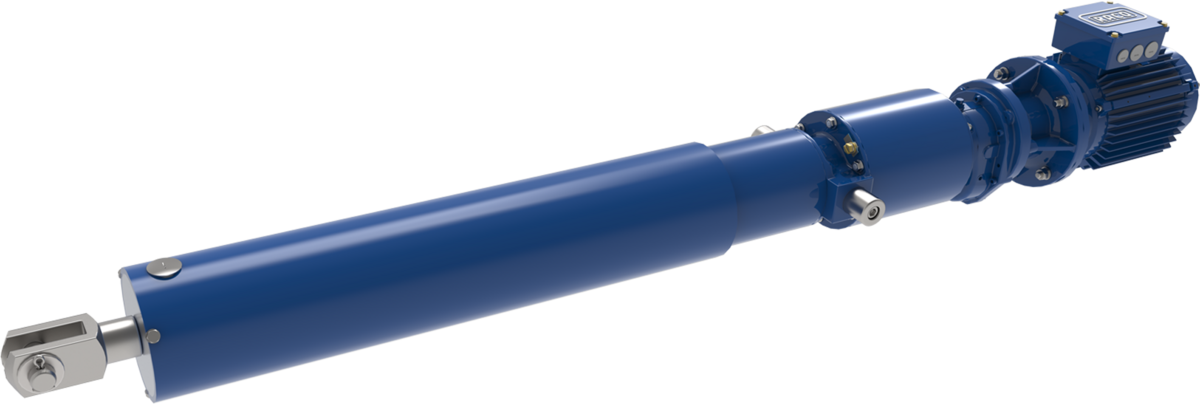
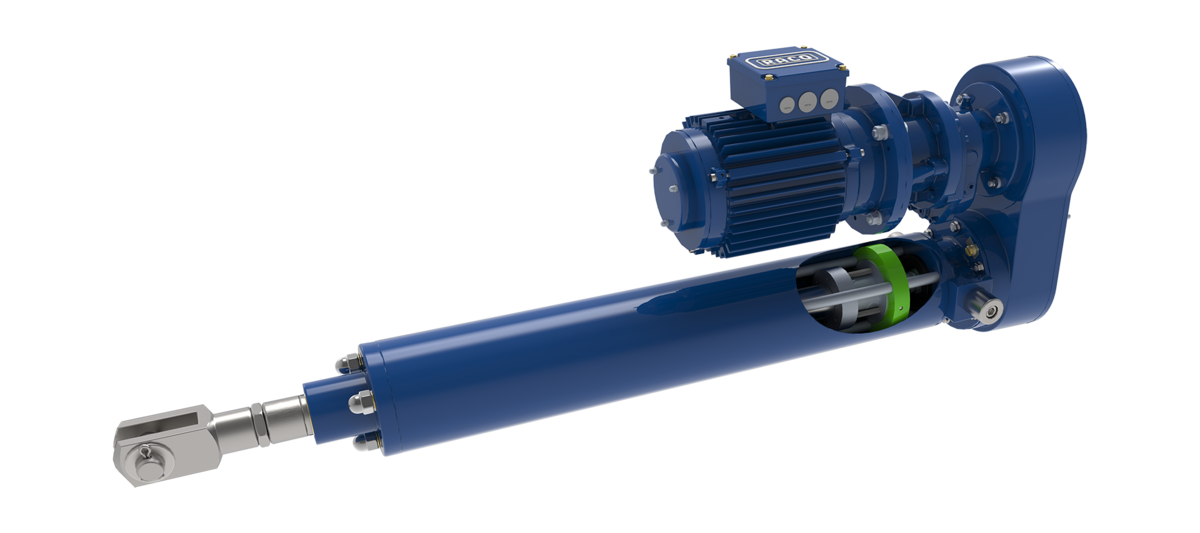
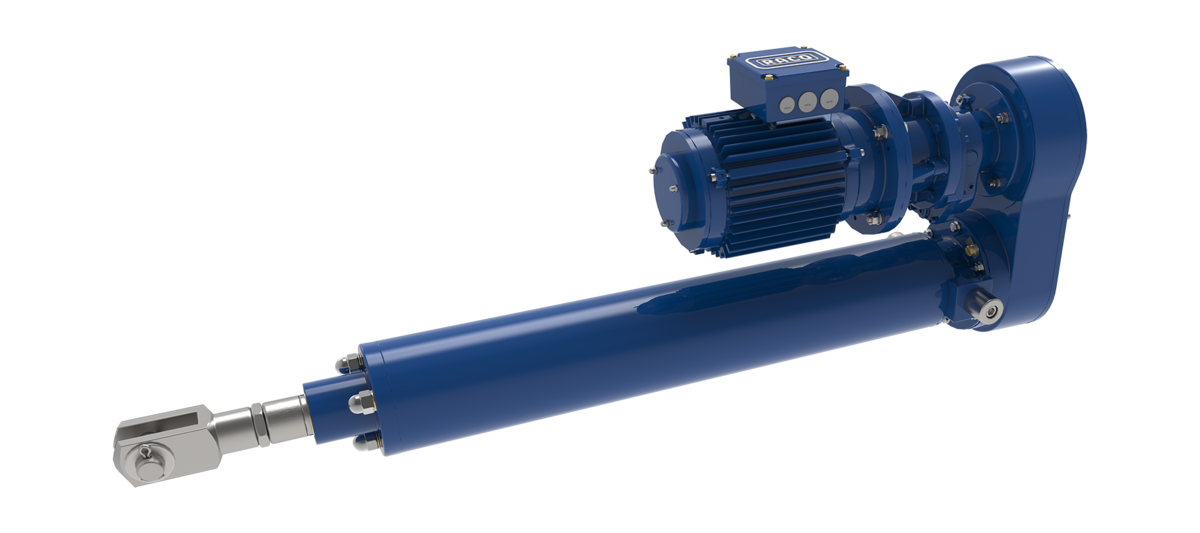
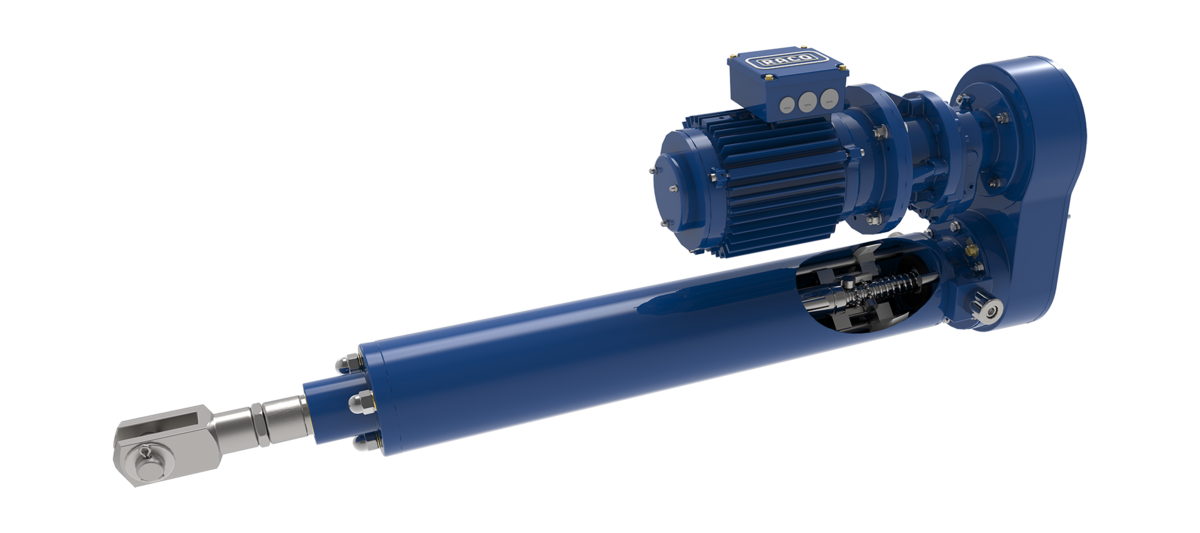
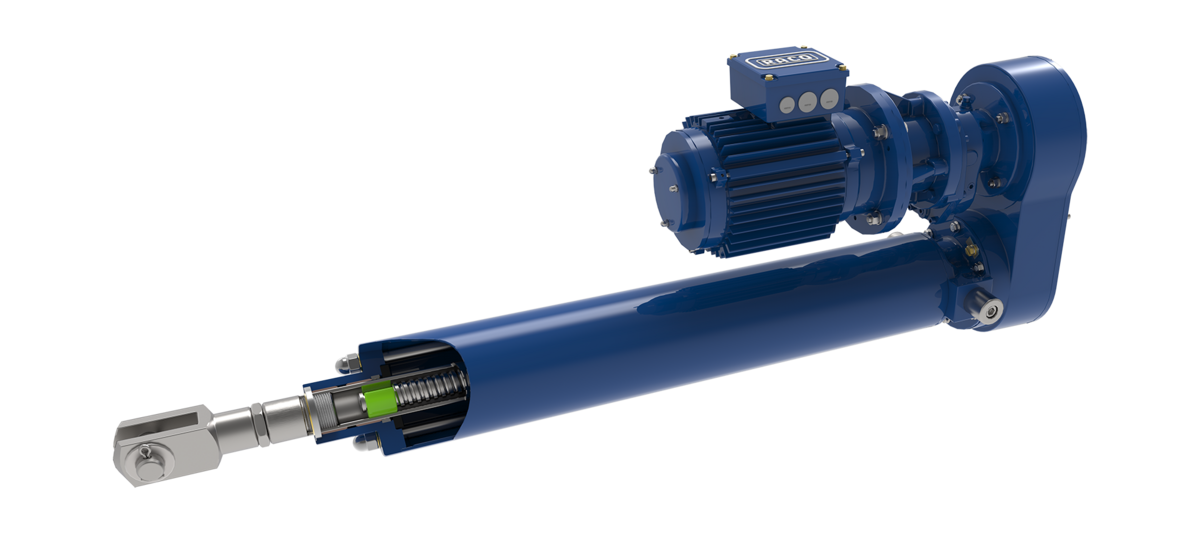
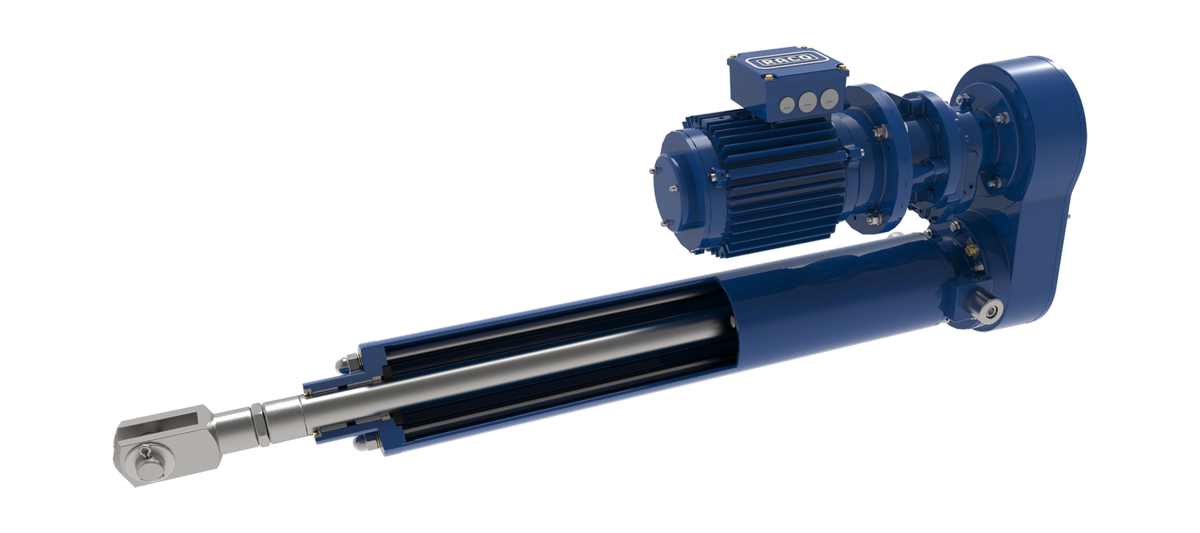
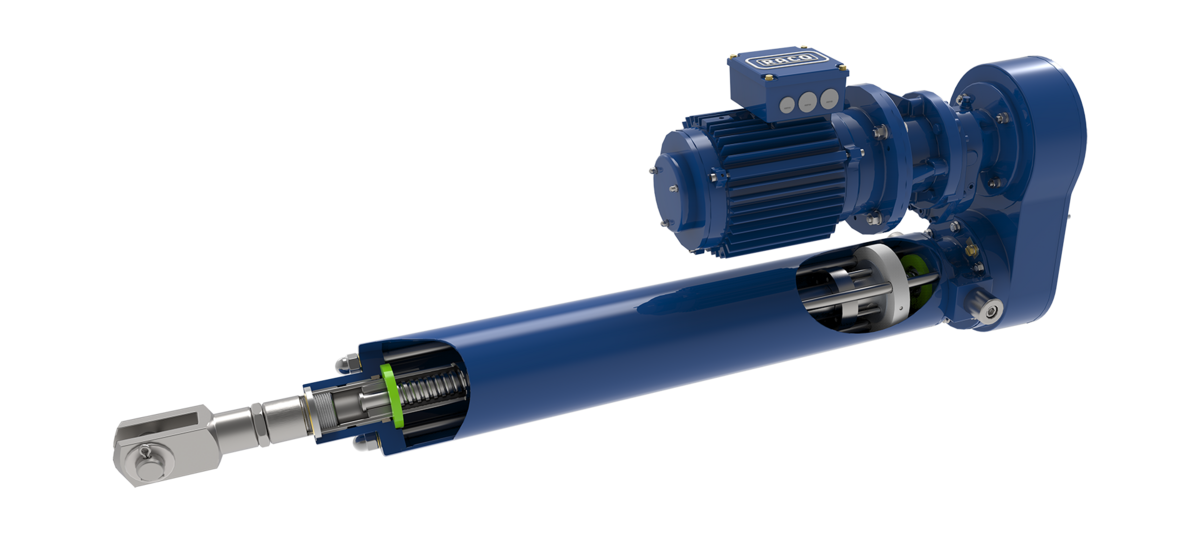
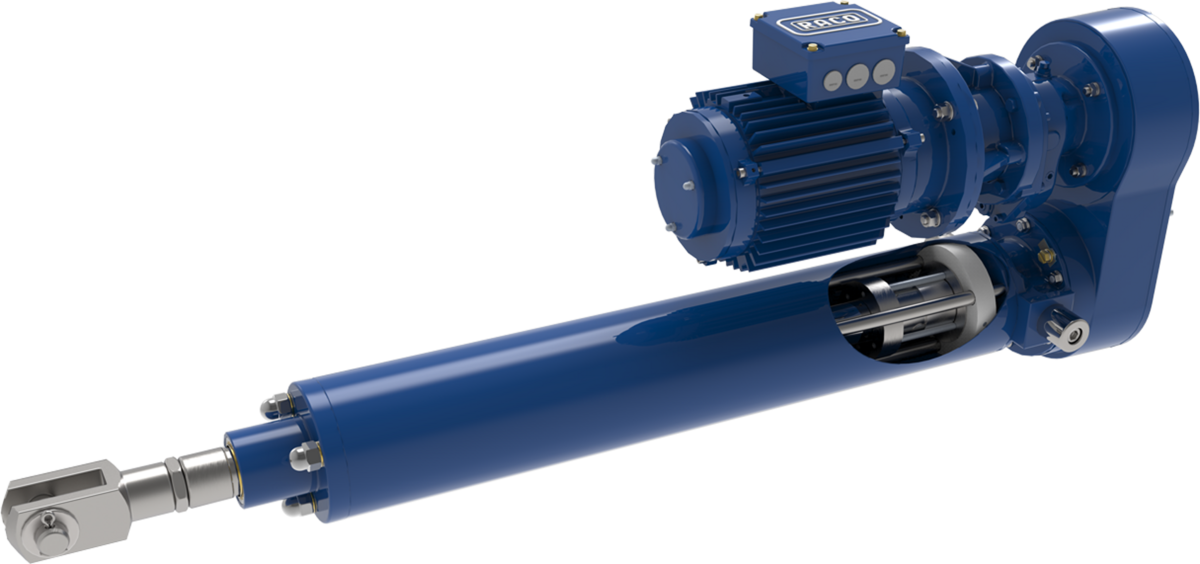
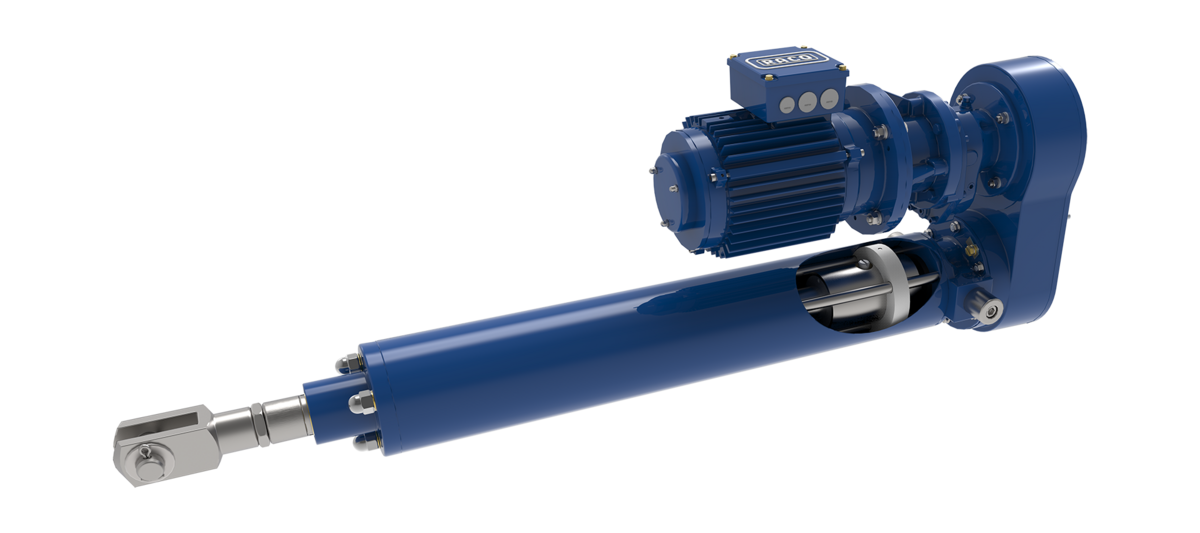
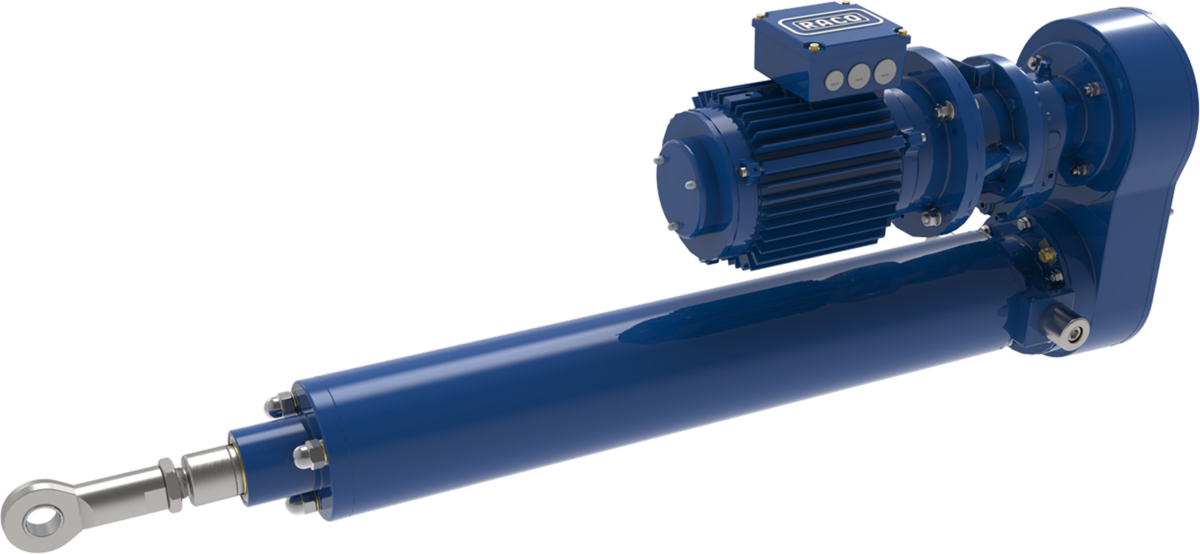
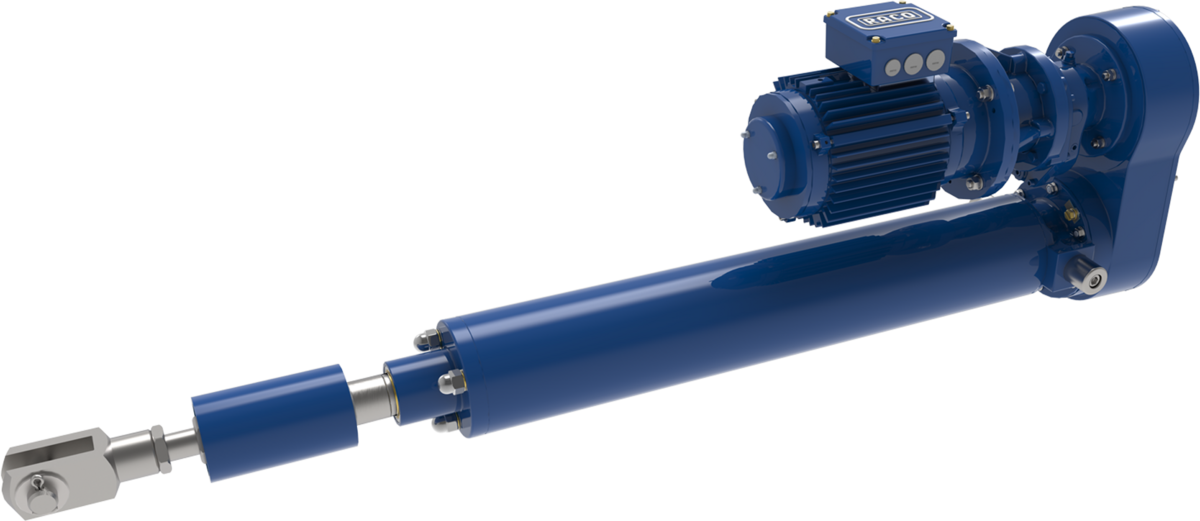
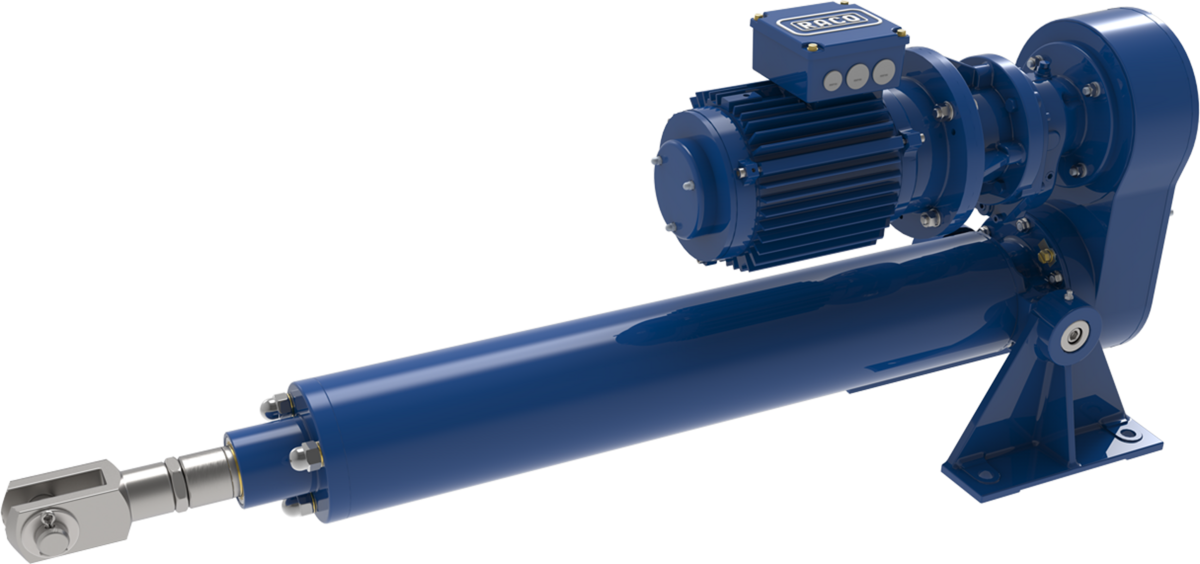
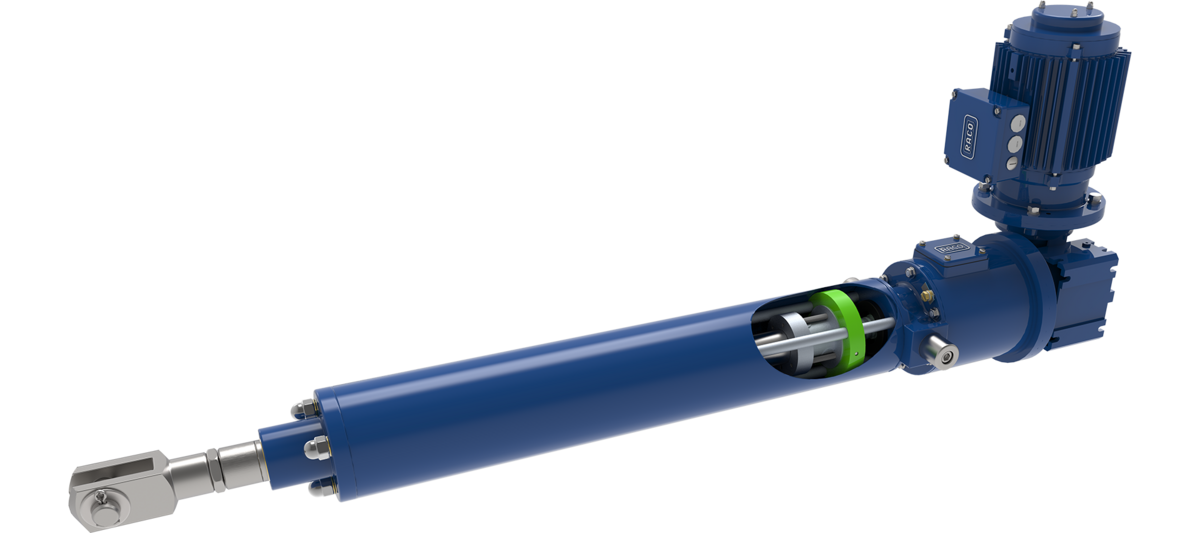
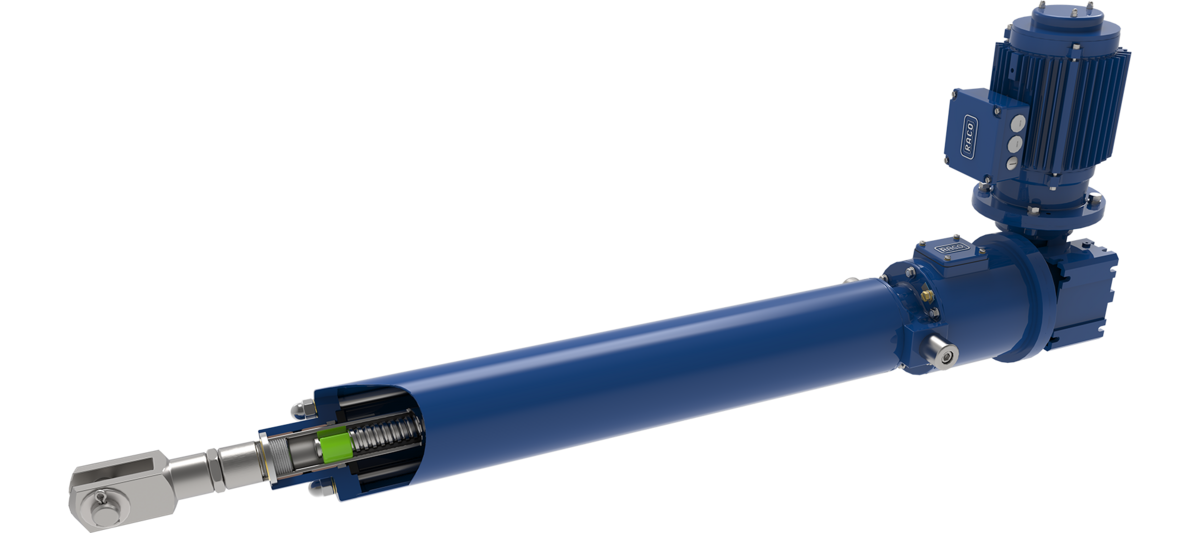
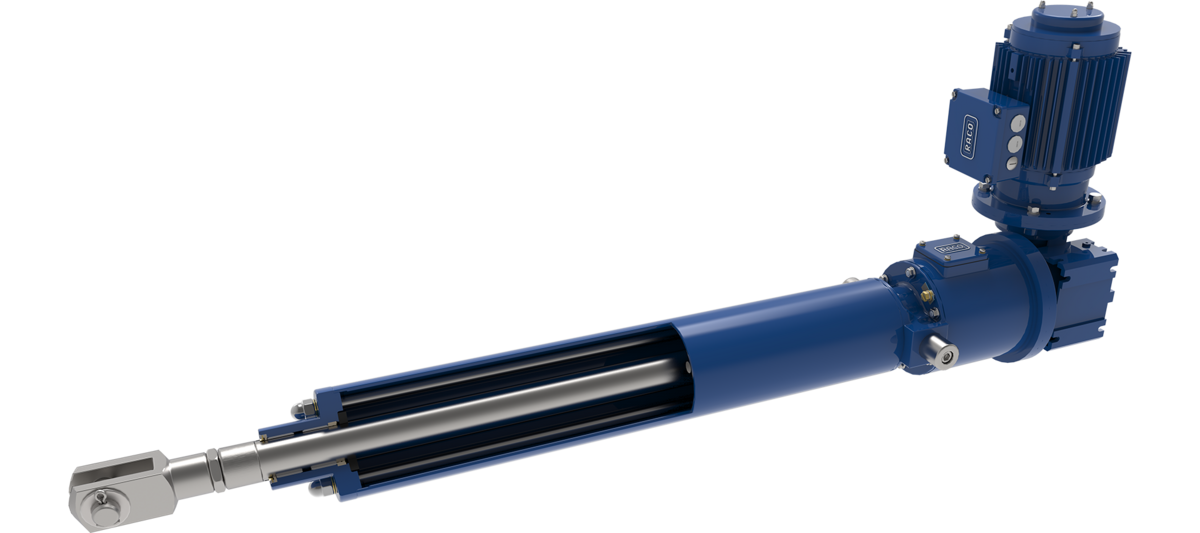
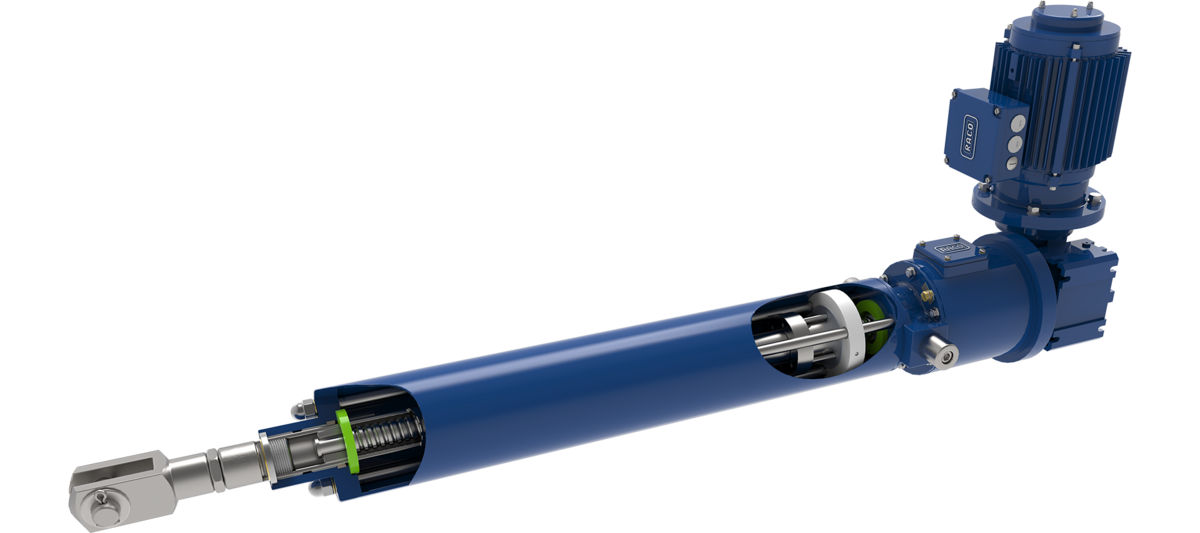
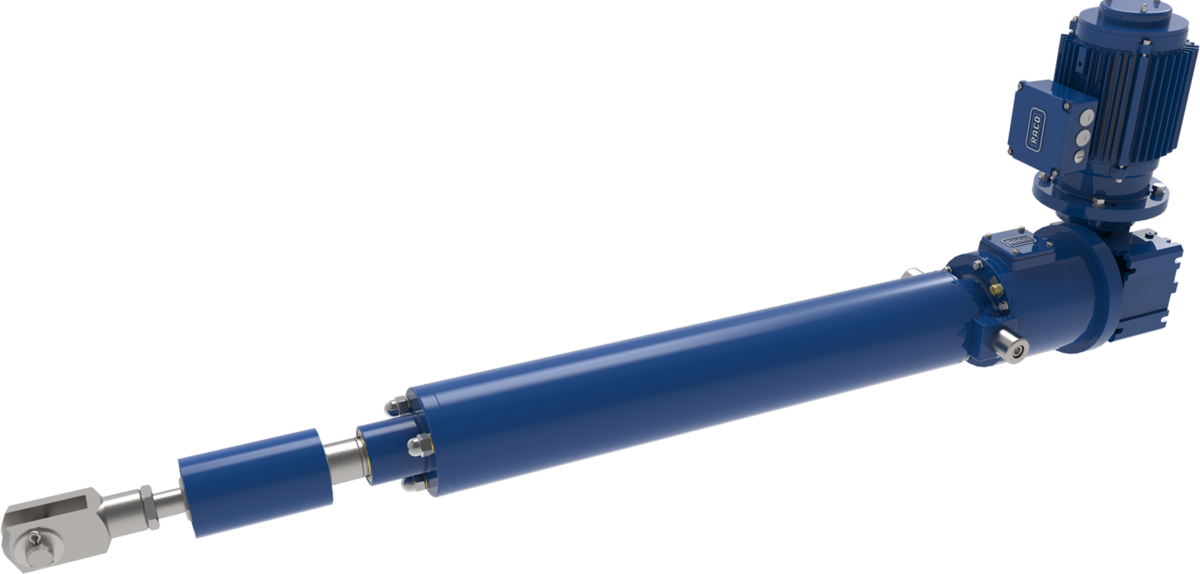
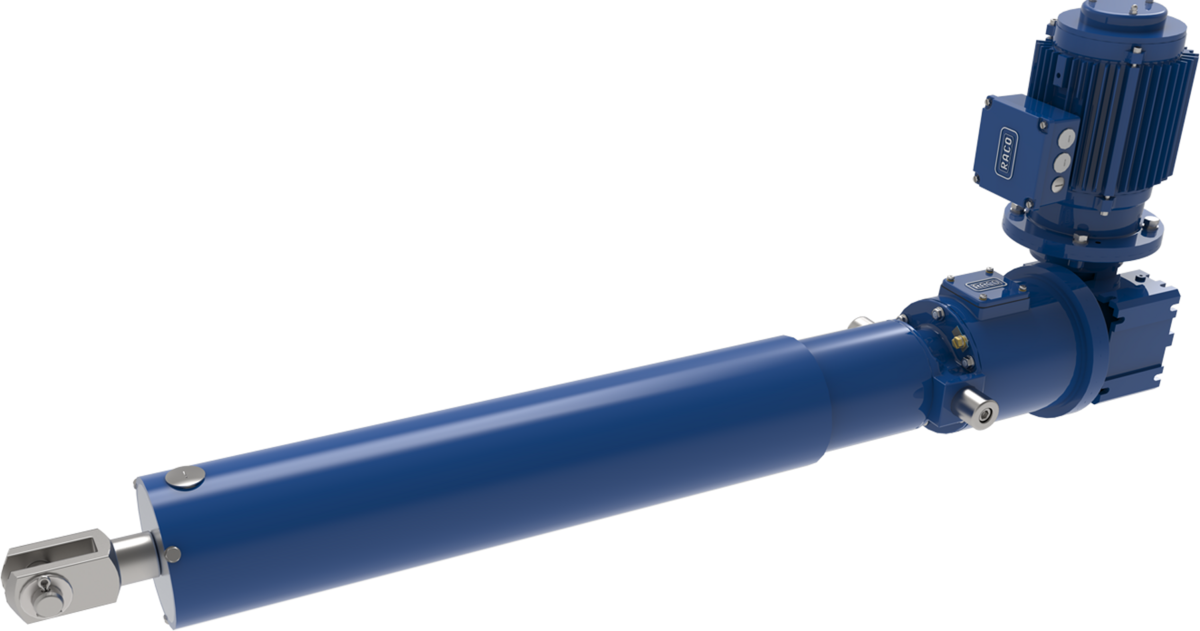
RACOmatic® Heavy duty electric actuator T1M8 - 148457


| Stroke (mm) | 200 | 400 | 600 | 800 | 1000 | 1200 | 1400 | 1600 | 1800 | 2000 |
| a3 (mm) | 780 | 980 | 1180 | 1380 | 1580 | 1780 | 1980 | 2180 | 2380 | 2580 |
| Drive type | Thrust (kN) | Rod speed (mm/s) | Motor power (kW) | Motor voltage (V) | Frequency (Hz) | Motor current (A) | Converter (kW) |
|---|---|---|---|---|---|---|---|
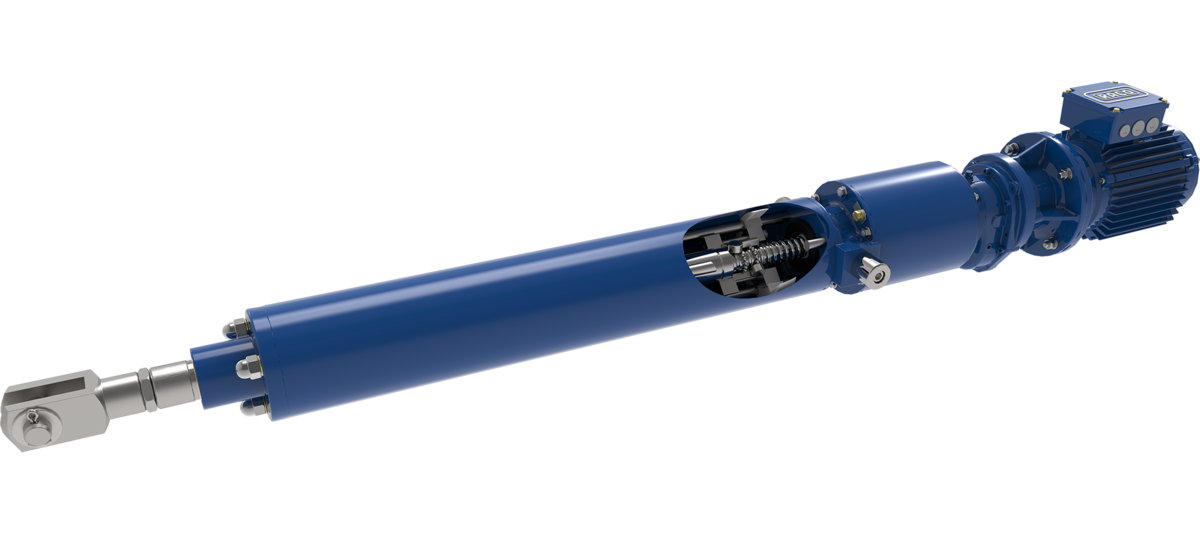
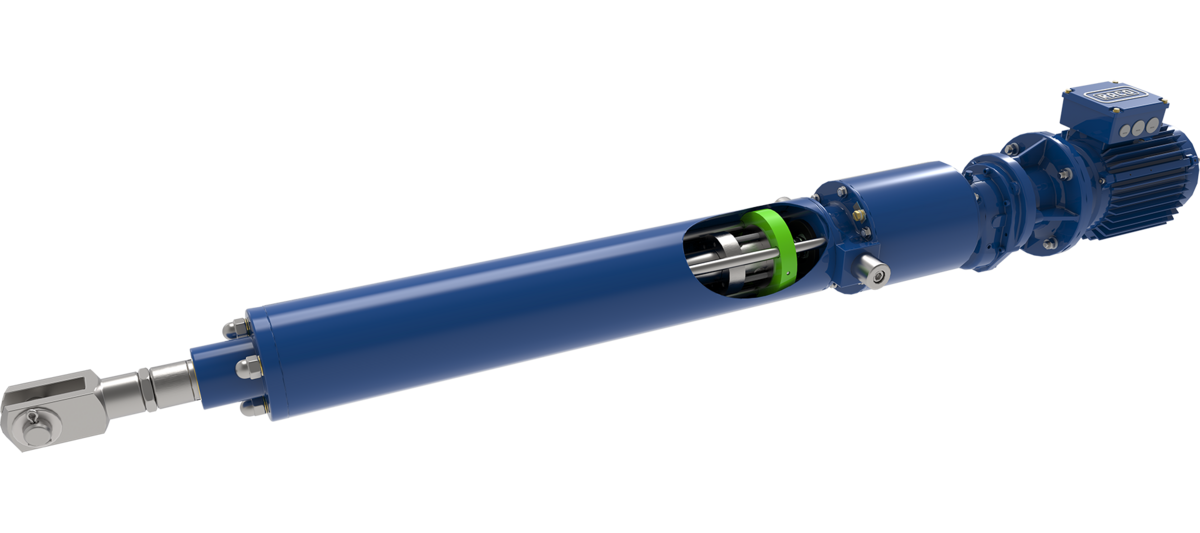
| Trapezoidal screw | 40.00 | 3 - 30 | 4.00 | 400 | 5 - 50 | 10.10 | 5.5 |
<<< back to list
Accessories type M



Configuration A
Two adjustable End Positions
- Accurate approach to two adjustable end positions
- Adjustable acceleration and deceleration ramps
- Thrust limitation up to the preset maximum thrust
- Position signal Output
- Limitation of adjustment options for position parameters as a safety Feature
- Speed adjustment via potentiometer
- Fault output
Configuration C
Analog Input for variable position
- Infinite variable stroke Position
- Adjustable acceleration and deceleration ramps
- Thrust limitation up to the specified maximum thrust
- Position signal Output
- Digital output "position reached"
- Speed adjustment via potentiometer
Configuration D
Thrust controlled Electric Actuator
- Infinite variable stroke Position
- Adjustable acceleration and deceleration ramps
- Thrust limitation up to the specified maximum thrust
- Position signal Output
- Digital output "position reached"
- Speed adjustment via potentiometer
Configuration E
Variable control via Field Bus interface
- Control of operating parameters (acceleration, thrust, position)
- Switchable control parameters, even under operating conditions
- Integration via field bus Interface
- Readout of operating parameters in digital Format
- Thrust limitation can be adjusted up to the maximum thrust
- Fault output
Configuration B
8 selectable Positions
- Precise approach to 8 selectable positions
- Adjustable acceleration and deceleration ramps
- Thrust limitation up to the specified maximum thrust
- Position signal Output
- Limitation of adjustment options for position parameters as a safety Feature
- Speed adjustment via potentiometer
- Fault output
Configuration F
Synchronisation control
- Control of operating parameters (acceleration, thrust, position)
- Switchable control parameters, even under operating conditions
- Integration via field bus Interface
- Readout of operating parameters in digital Format
- Thrust limitation can be adjusted up to the maximum thrust
- Fault output
EPS CAN

- non-contact, wear-free multiturn sensorsystem
- digital resolution < 0,01mm
- integrated evaluation of thermal contact / PTC thermistor sensor
- 2 end positions (relay outputs)
- 2 intermediate positions (npn transistor outputs 24 VDC)
- overload shut-down
- parameter setting using PC Windows software - RACOmatic® tool
- analogue position feedback
- CANopen interface


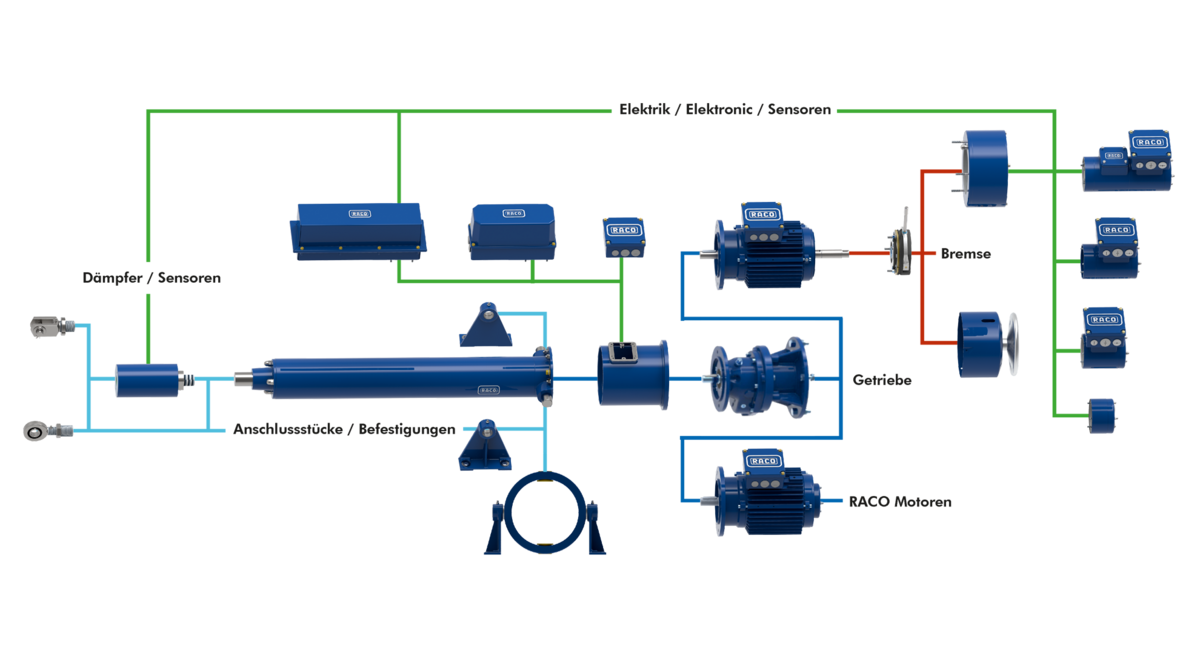
Accessories type N





Configuration A
Two adjustable End Positions
- Accurate approach to two adjustable end positions
- Adjustable acceleration and deceleration ramps
- Thrust limitation up to the preset maximum thrust
- Position signal Output
- Limitation of adjustment options for position parameters as a safety Feature
- Speed adjustment via potentiometer
- Fault output
Configuration C
Analog Input for variable position
- Infinite variable stroke Position
- Adjustable acceleration and deceleration ramps
- Thrust limitation up to the specified maximum thrust
- Position signal Output
- Digital output "position reached"
- Speed adjustment via potentiometer
Configuration D
Thrust controlled Electric Actuator
- Infinite variable stroke Position
- Adjustable acceleration and deceleration ramps
- Thrust limitation up to the specified maximum thrust
- Position signal Output
- Digital output "position reached"
- Speed adjustment via potentiometer
Configuration E
Variable control via Field Bus interface
- Control of operating parameters (acceleration, thrust, position)
- Switchable control parameters, even under operating conditions
- Integration via field bus Interface
- Readout of operating parameters in digital Format
- Thrust limitation can be adjusted up to the maximum thrust
- Fault output
Configuration B
8 selectable Positions
- Precise approach to 8 selectable positions
- Adjustable acceleration and deceleration ramps
- Thrust limitation up to the specified maximum thrust
- Position signal Output
- Limitation of adjustment options for position parameters as a safety Feature
- Speed adjustment via potentiometer
- Fault output
Configuration F
Synchronisation control
- Control of operating parameters (acceleration, thrust, position)
- Switchable control parameters, even under operating conditions
- Integration via field bus Interface
- Readout of operating parameters in digital Format
- Thrust limitation can be adjusted up to the maximum thrust
- Fault output
EPS CAN
- non-contact, wear-free multiturn sensorsystem
- digital resolution < 0,01mm
- integrated evaluation of thermal contact / PTC thermistor sensor
- 2 end positions (relay outputs)
- 2 intermediate positions (npn transistor outputs 24 VDC)
- overload shut-down
- parameter setting using PC Windows software - RACOmatic® tool
- analogue position feedback
- CANopen interface


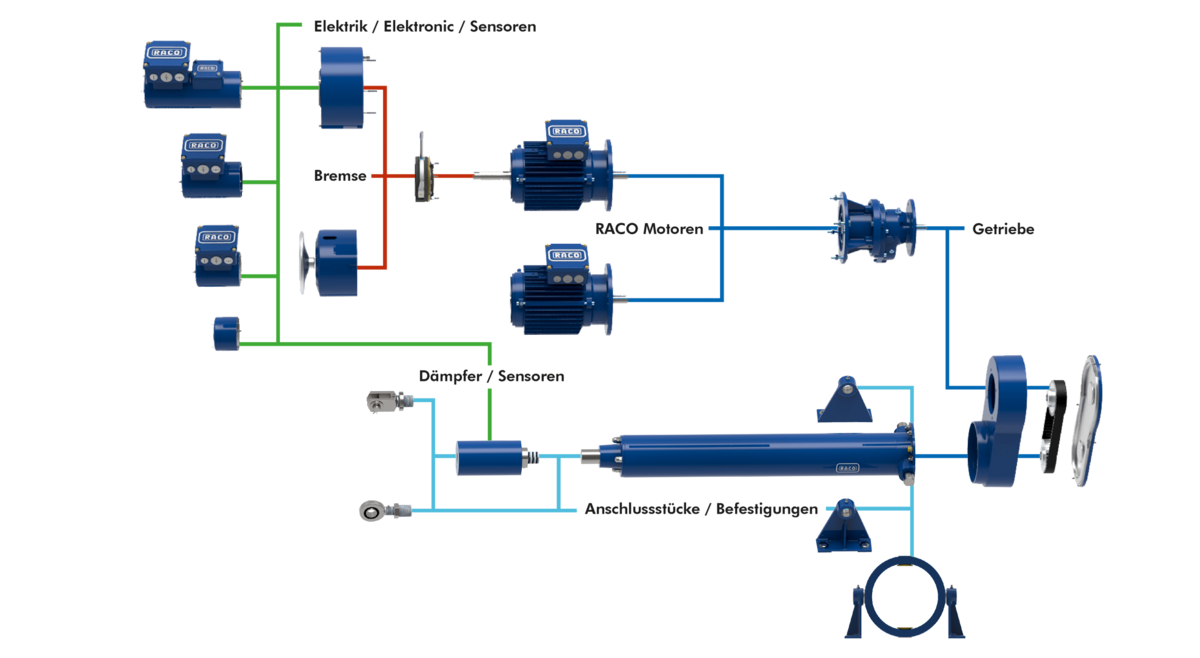
Accessories type T




Configuration A
Two adjustable End Positions
- Accurate approach to two adjustable end positions
- Adjustable acceleration and deceleration ramps
- Thrust limitation up to the preset maximum thrust
- Position signal Output
- Limitation of adjustment options for position parameters as a safety Feature
- Speed adjustment via potentiometer
- Fault output
Configuration C
Analog Input for variable position
- Infinite variable stroke Position
- Adjustable acceleration and deceleration ramps
- Thrust limitation up to the specified maximum thrust
- Position signal Output
- Digital output "position reached"
- Speed adjustment via potentiometer
Configuration D
Thrust controlled Electric Actuator
- Infinite variable stroke Position
- Adjustable acceleration and deceleration ramps
- Thrust limitation up to the specified maximum thrust
- Position signal Output
- Digital output "position reached"
- Speed adjustment via potentiometer
Configuration E
Variable control via Field Bus interface
- Control of operating parameters (acceleration, thrust, position)
- Switchable control parameters, even under operating conditions
- Integration via field bus Interface
- Readout of operating parameters in digital Format
- Thrust limitation can be adjusted up to the maximum thrust
- Fault output
Configuration B
8 selectable Positions
- Precise approach to 8 selectable positions
- Adjustable acceleration and deceleration ramps
- Thrust limitation up to the specified maximum thrust
- Position signal Output
- Limitation of adjustment options for position parameters as a safety Feature
- Speed adjustment via potentiometer
- Fault output
Configuration F
Synchronisation control
- Control of operating parameters (acceleration, thrust, position)
- Switchable control parameters, even under operating conditions
- Integration via field bus Interface
- Readout of operating parameters in digital Format
- Thrust limitation can be adjusted up to the maximum thrust
- Fault output
EPS CAN
- non-contact, wear-free multiturn sensorsystem
- digital resolution < 0,01mm
- integrated evaluation of thermal contact / PTC thermistor sensor
- 2 end positions (relay outputs)
- 2 intermediate positions (npn transistor outputs 24 VDC)
- overload shut-down
- parameter setting using PC Windows software - RACOmatic® tool
- analogue position feedback
- CANopen interface




User login
Enter your username and password here in order to log in on the website
Create User-account
As a registered user you have access to restricted technical documentations, CAD-files as well as 3D solids.
Click her in order to create an user-account: Create User-account
Please read our notes on privacy data protection.