RACOmatic® - more than the sum of its parts
The RACOmatic® expands the functionality of RACO electric actuators to ready-to-use, highly precise linear actuation drives. Mechanical components, software, and sensors have been perfectly matched to the equipment architecture and the relevant requirements. RACO thus provides a customized solution for any actuation profile across a wide range of thrust ranges and designs - all with the typical reliability you have become accustomed to with RACO products.
When it comes to maximum process reliability and consistent manufacturing quality, the exact and fully reproducible control of movements in automation is indispensable
CONFIGURATION A
Two adjustable End Positions

- Accurate approach to two adjustable end positions
- Adjustable acceleration and deceleration ramps
- Thrust limitation up to the preset maximum thrust
- Position signal Output
- Limitation of adjustment options for position parameters as a safety Feature
- Speed adjustment via potentiometer
- Fault output
Configuration
The RACOmatic® will be controlled via two digital input signals: extend and retract. The extend or retract instruction will be executed as long as the respective signal is activated or the programmed positions are reached precisely.
End positions are signaled via digital outputs in the form of dry relay output contacts. In addition, a general fault output signal is available. The operating speed of the actuator can be adjusted easily in a selective range with the integrated potentiometer.
Application Examples
Feedback control for positioning, adjustable acceleration and deceleration ramps for flaps, mass flow, continuous blending, and mixing applications.
CONFIGURATION B
8 selectable Positions

- Precise approach to 8 selectable positions
- Adjustable acceleration and deceleration ramps
- Thrust limitation up to the specified maximum thrust
- Position signal Output
- Limitation of adjustment options for position parameters as a safety Feature
- Speed adjustment via potentiometer
- Fault output
Configuration
Up to eight fixed positions can be selected and used for precise stopping points. These stop points can be changed over the entire stroke length via a Windows-based tool or pre-programmed at the factory. The selection of the stop positions is realized by the binary combination of the three input signals. As soon as the enable signal has been activated, the selected position is approached accurately using the preset ramps and speeds.
A digital output provides a feedback signal when this new position has been reached. Position parameters can only be set within the limits specified by the factory. Your drive is fully protected. The adjustment speed of the RACOmatic® can be set using the integrated potentiometer.
Application Examples
Up to eight selectable stop positions for trim size adjustment, packaging formats, stacking, edge guide, elevation with multiple levels, or sorting and diversion gates.
CONFIGURATION C
Analog Input for variable position

- Infinite variable stroke Position
- Adjustable acceleration and deceleration ramps
- Thrust limitation up to the specified maximum thrust
- Position signal Output
- Digital output "position reached"
- Speed adjustment via potentiometer
Configuration
An analog 4-20mA signal generates the position setpoint signal and follows a linear scale over the selected two end points. The feedback position control loop will be activated by means of a binary enable signal. With the enable signal the actuator will accelerate to the set speed, pre-calculate the end position, decelerate prior to the setpoint position, come to a stop, and then hold at the precise setpoint position.
The RACOmatic® generates position feedback at any point in time via analog output signal. In addition, the digital output signal "position reached" is generated if the setpoint and the actual position match. The operating speed of the actuator can be easily adjusted in a selective range with the integrated potentiometer.
Application Examples
For positioning and control tasks, e.g., metering valve, diverter gate, gate valves with continuous stroke range. Positioning accuracy is approximately 1% of the adjustment stroke. Ramps can be adjusted for the gentle acceleration and deceleration of large masses as well as analog and digital position feedback.
CONFIGURATION D
Thrust controlled Electric Actuator

- Control signal retract and extend
- Thrust-controlled stopping and holding of thrust
- Adjustable thrust limitation up to the specified maximum thrust
- Analog output of actual position and actual thrust
- Speed adjustment via potentiometer
- Fault output
Configuration
The actuator's thrust can be varied from 0-100% by means of an analog input 4-20mA signal, whereby 100% represents the maximum rated thrust. If the setpoint force is reached, the actuator will maintain that force and the associated position until the binary input Open/Close signal is removed.
This means that the RACOmatic® will generate up to 100% force at zero RPM. End positions are signaled via digital outputs in the form of dry relay output contacts. In addition, a general fault output signal is available. The operating speed of the actuator can easily be adjusted in a selective range with the integrated potentiometer.
Application Examples
Ideal solution for force control used in joining, assembly, forming, press control applications, material testing, lid and valve closures with defined force requirements. Analog feedback control signals for force and stroke are available. Analog target thrust specifications and analog signal feedback for displacement and thrust permit the process to be controlled and monitored.
CONFIGURATION E
Variable control via Field Bus interface

- Control of operating parameters (acceleration, thrust, position)
- Switchable control parameters, even under operating conditions
- Integration via field bus Interface
- Profinet Interface
- Readout of operating parameters in digital Format
- Thrust limitation can be adjusted up to the maximum thrust
- Fault output
Configuration
The control of the RACOmatic® actuator is accomplished by utilizing one of the above specified field-bus protocols. With communication capability directly to the RACOmatic® bus interface, all functional and operational parameters are accessible to the user. Force, position, speed, acceleration, and deceleration can be changed and monitored. Actual values such as position, motor moment, utilization of the actuator capability, systems and diagnostic parameters can be accessed via the communication interface.
RACOmatic® internal digital input and output channels are usable for connection to additional customer sensors and outputs. This enables the customer to have a high degree of flexibility. In the event that the main power is turned off, a 24V DC power supply for the communication module must be provided by the customer to guarantee the availability of the field-bus interface.
Application Examples
Suitable for numerical control of multiple axes for free movement with very precise control. It is also capable of alternating between position and force control for joining, forming, and press applications.
Additional uses include: robotic assembly, assembly lines, material handling between machines, welding, and spray applications. Integration of multiple actuators is possible via the communication network to generate independent motion movements. All crucial information can be uploaded and visualized on a centralized control system.
CONFIGURATION F
Synchronisation control

- Accurate positioning of up to 4 RACO electric actuators with synchronous speed and Position
- Adjustable acceleration and deceleration ramps
- Thrust limitation up to the preset maximum thrust
- Position signal Output
- Fault output
Configuration
This option provides synchronized movement of up to four RACOmatic® actuators. With digital extend and retract commands the master RACOmatic® generates the setpoint for position and speed signal per programmed acceleration ramp. These setpoint signals are broadcasted via the internal CANopen bus system to the attached slave RACOmatic® units and interpreted as their setpoint signals. The supervisory PLC/MMI with its alphanumeric and graphic display, function key interface will coordinate via the system bus the initial setup as well as the synchronized movement. Extensive error detection, communications supervision, and clear text interaction are provided.
Application Examples
Motion profile is useful for factory automation, lift tables, press forms, automatic assembly, lifting and adjustment of large structures such as locks on dams, bridges, ferry terminals, doors, and gates in mining, as well as steel mill applications.
RACOmatic® Tool - full control via your computer
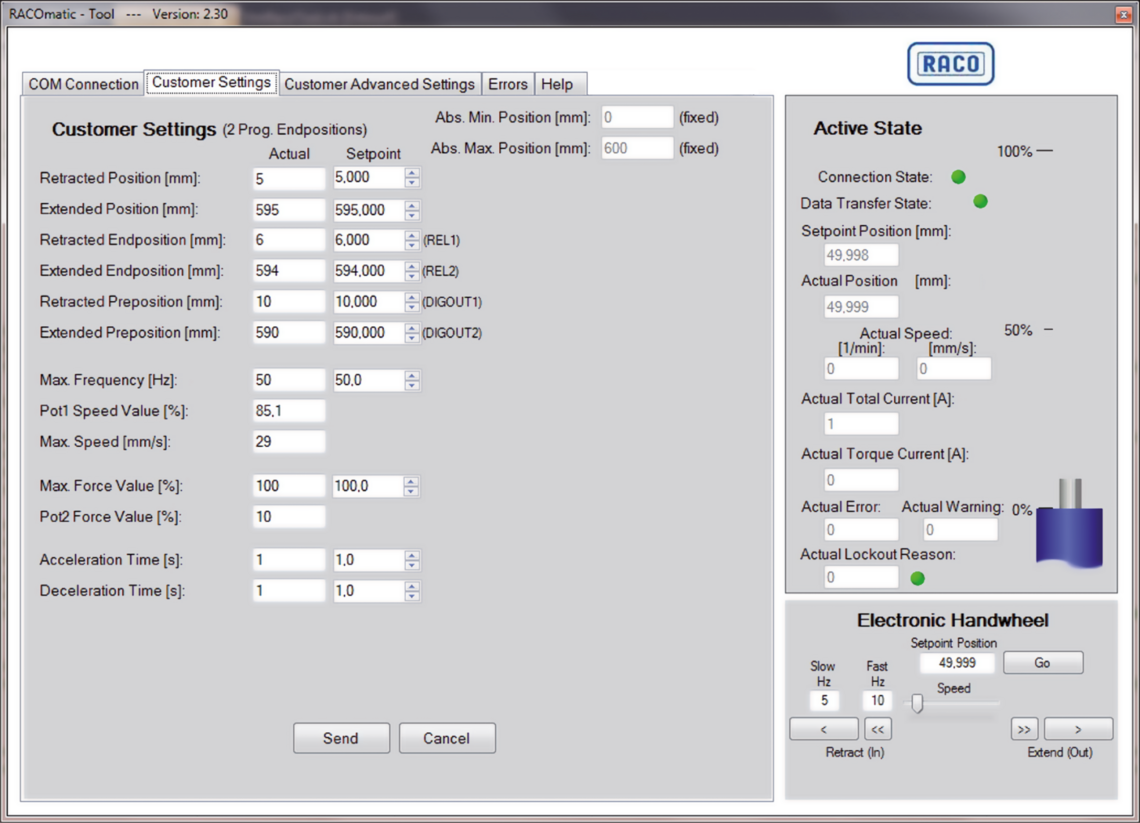
Integrated drive systems with RACOmatic® are pre-configured for your operational requirements and are ready for operation as soon as they have been connected. RACO analyzes and documents all pre-configured Systems Parameters and can restore them at any time.
The unique RACOmatic® Tool application software efficiently reduces the approximately 800 control variables resulting from the combination of the variable frequency drive and the sensor electronic to just a few parameters needed for your application.
The electronic handwheel function can be enabled during installation and startup to retract and extend the actuator independently from the customer's control equipment. The RACOmatic® Tool also supports the configuration of field bus systems.