Produkte: Falscher Parameter. GET/POST var 'tt_products[product]' wurde nicht angegeben oder kein Element mit uid = 0 auf den erlaubten Seiten (137) gefunden.
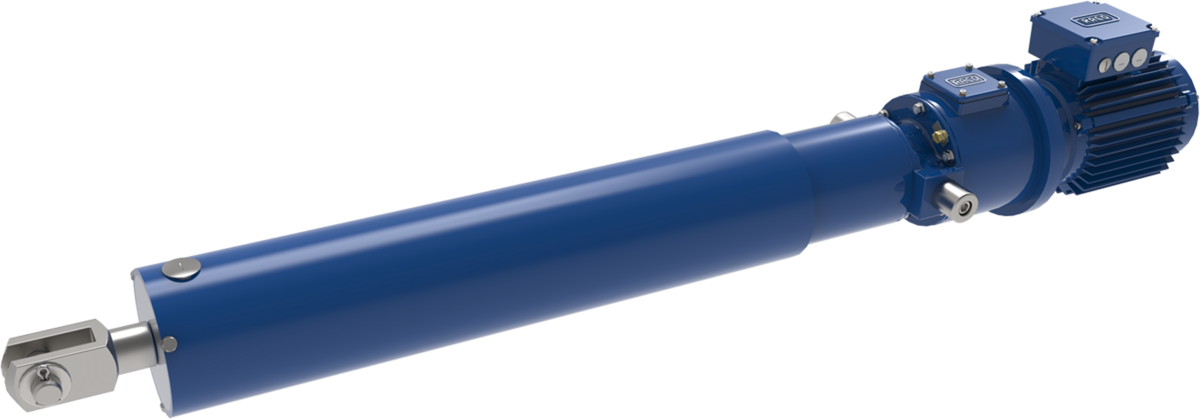
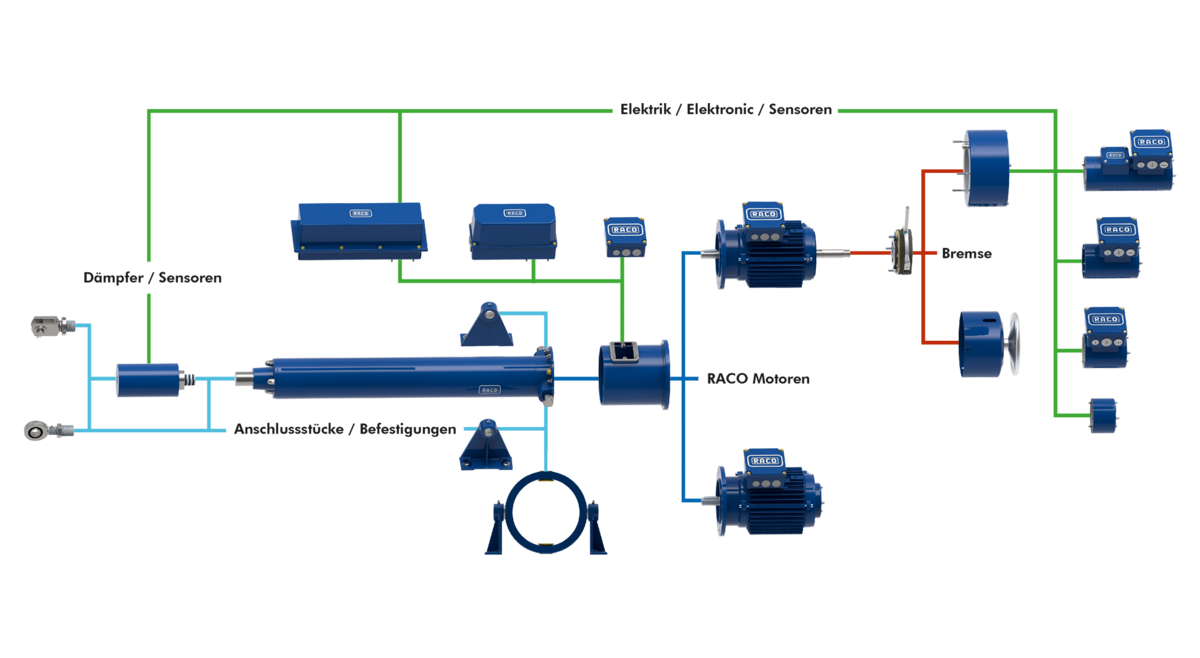
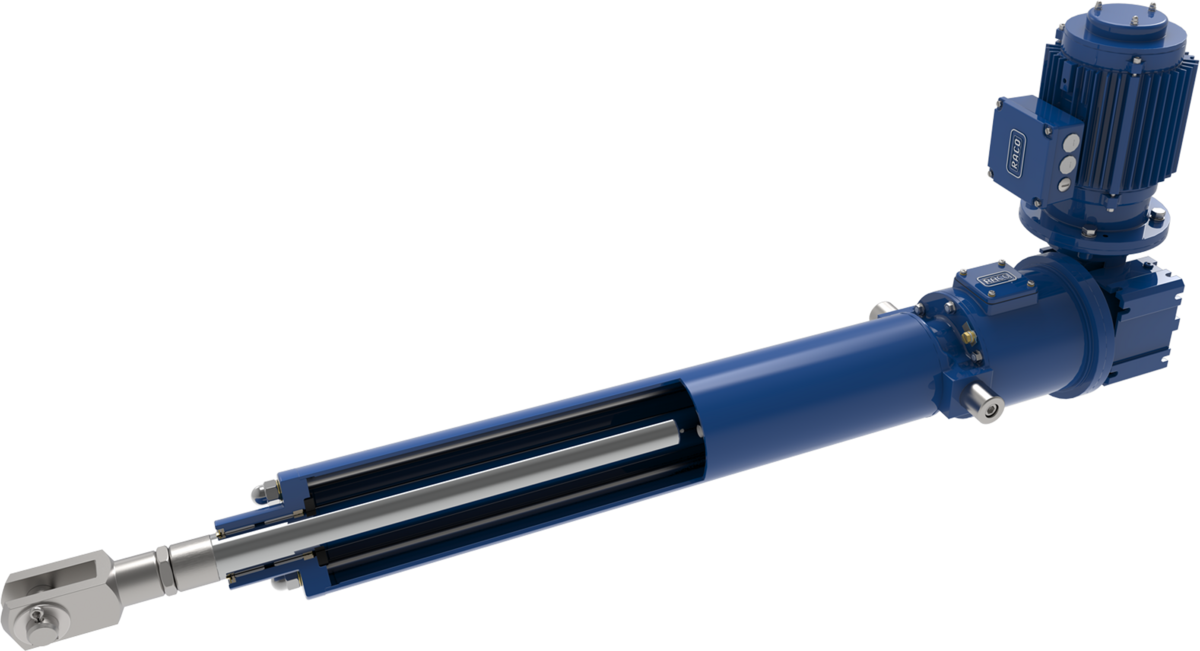
Zubehör Bauform A
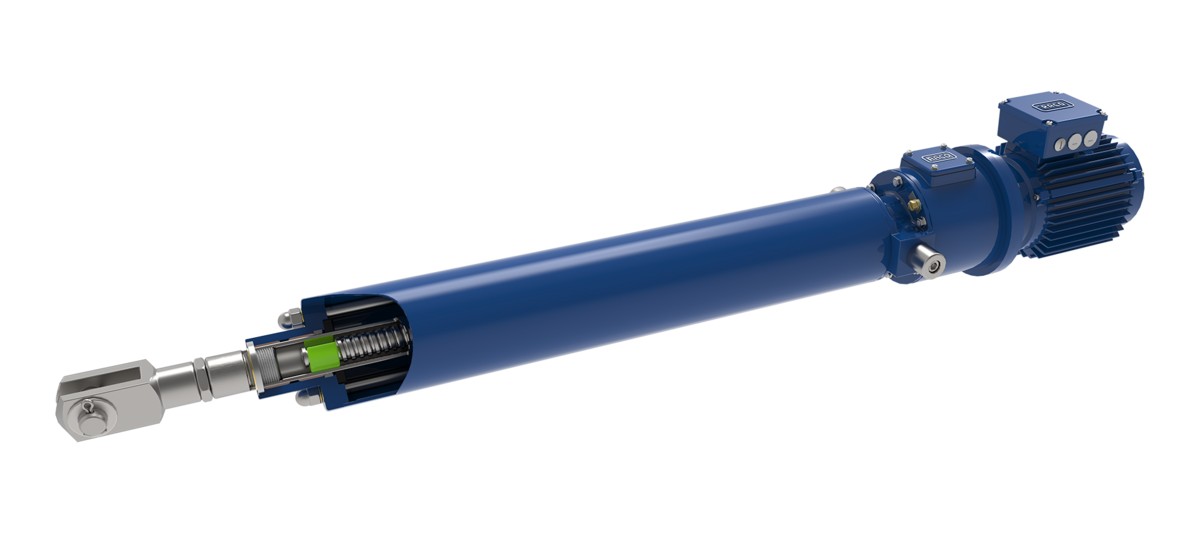

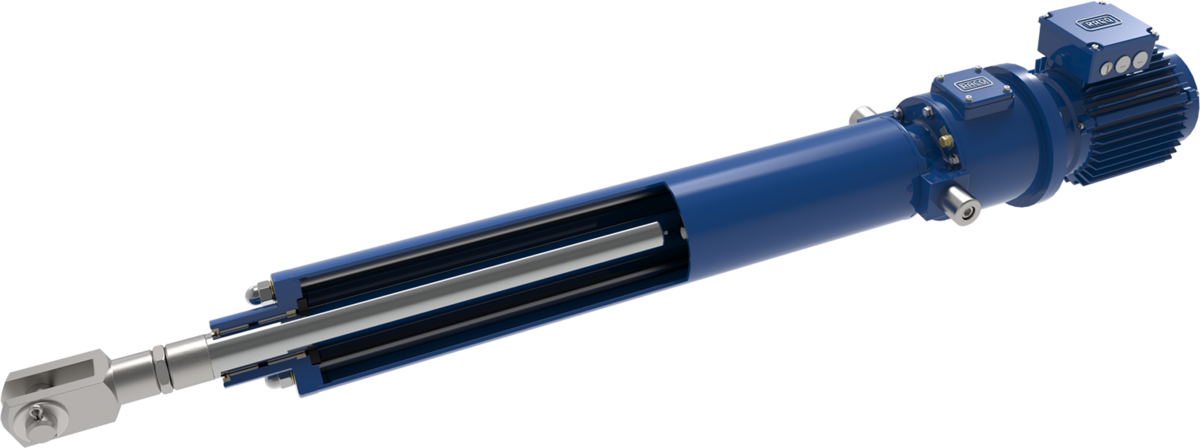

Konfiguration A
Zwei einstellbare Endlagen
- Positionsgenaues Anfahren von 2 einstellbaren Endlagen
- Einstellbare Beschleunigungs- und Verzögerungsrampen
- Kraftbegrenzung bis zur eingestellten Maximalkraft
- Ausgabe des Positionssignals
- Begrenzung der Einstellmöglichkeiten der Positionsparameter als Schutzfunkton
- Verstellgeschwindigkeit über Potentiometer einstellbar
- Störmeldeausgang
Konfiguration B
8 einstellbare Positionen
- Positionsgenaues Anfahren von 8 einstellbaren Endlagen
- Einstellbare Beschleunigungs- und Verzögerungsrampen
- Kraftbegrenzung bis zur eingestellten Maximalkraft
- Ausgabe des Positionssignals
- Begrenzung der Einstellmöglichkeiten der Positionsparameter als Schutzfunkton
- Verstellgeschwindigkeit über Potentiometer einstellbar
- Störmeldeausgang
Konfiguration C
Weggesteuerter Elektrozylinder
- Anfahren beliebig vieler Positionen
- Einstellbare Beschleunigungs- und Verzögerungsrampen
- Kraftbegrenzung bis zur eingestellten Maximalkraft
- Ausgabe des PositionssignalsDigitale Ausgabe des Signals „Position erreicht“
- Verstellgeschwindigkeit über Potentiometer einstellbar
Konfiguration D
Kraftgesteuerter Elektrozylinder
- Steuerung des Befehls zur Aus- und Einfahrt
- Kraftgesteuertes Stoppen und Halten der Kraft
- Veränderbare Kraftbegrenzung bis zur vorgegebenen Maximalkraft
- Analoge Ausgabe der Ist-Position und der Ist-Kraft
- Verstellgeschwindigkeit über Potentiometer einstellbar
- Störmeldeausgang
Konfiguration E
Variable Ansteuerung über Feldbusschnittstelle
- Steuerung der Betriebsparameter (Beschleunigung, Kraft, Position)
- Umschaltbare Steuerparameter auch während des Prozesses
- Integration über Feldbusschnittstelle
- Genaue Ausgabe der Betriebsparameter
- Deizidierte Störmeldungen
- Kraftbegrenzung einstellbar bis zur Maximalkraft
- Störmeldeausgang
Konfiguration F
Gleichlaufsteuerung
- Positionsgenaues Anfahren von bis zu 4 RACO-Elektrozylinder im Gleichlauf
- Einstellbare Beschleunigungs- und Verzögerungsrampen
- Kraftbegrenzung bis zur eingestellten Maximalkraft
- Genaue Ausgabe der Betriebsparameter
- Analoge Ausgabe des Positionssignals
- Störmeldeausgang
EPS CAN

- berührungsloses, verschleißfreies Multiturn-Sensorsystem
- digitale Auflösung < 0,01mm
- integrierte Auswertung Thermokontakt / Kaltleiterfühler
- 2 Endlagen (potentialfreie Relaiskontakte)
- 2 Zwischenpositionen (npn-Transistorausgänge 24 VDC)
- Überlastabschaltung
- Parametrierung mittels Software RACOmatic® Tool
- Analoge Stellungsrückmeldung
- CANopen Schnittstelle
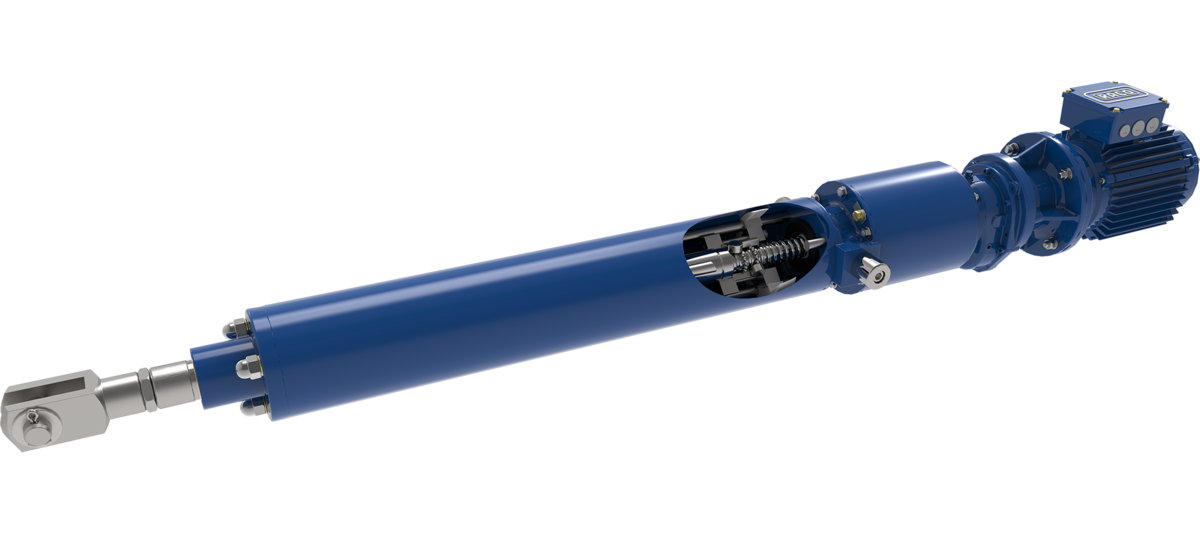
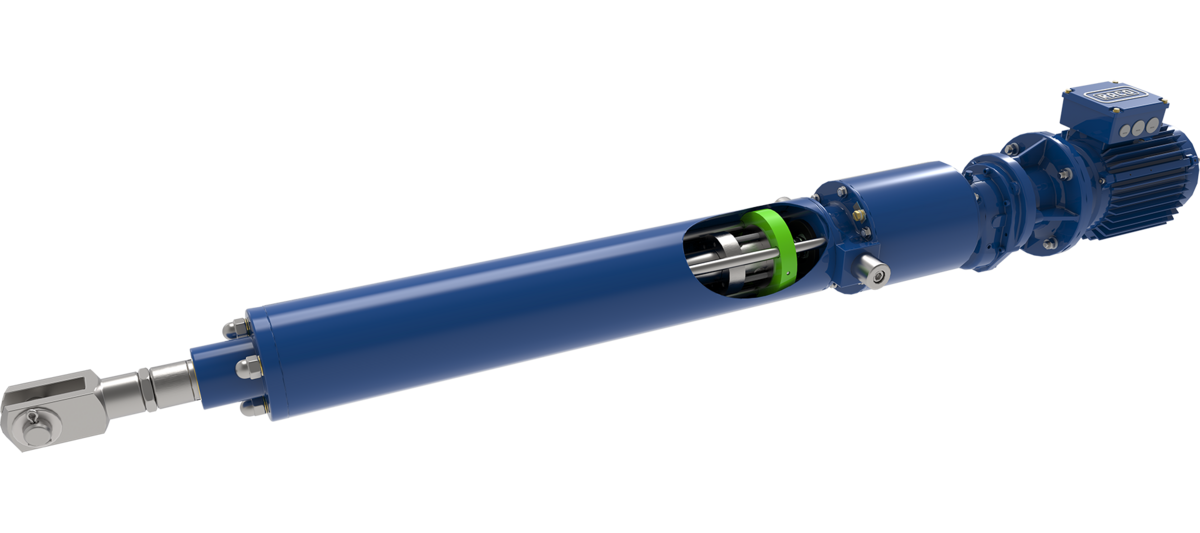
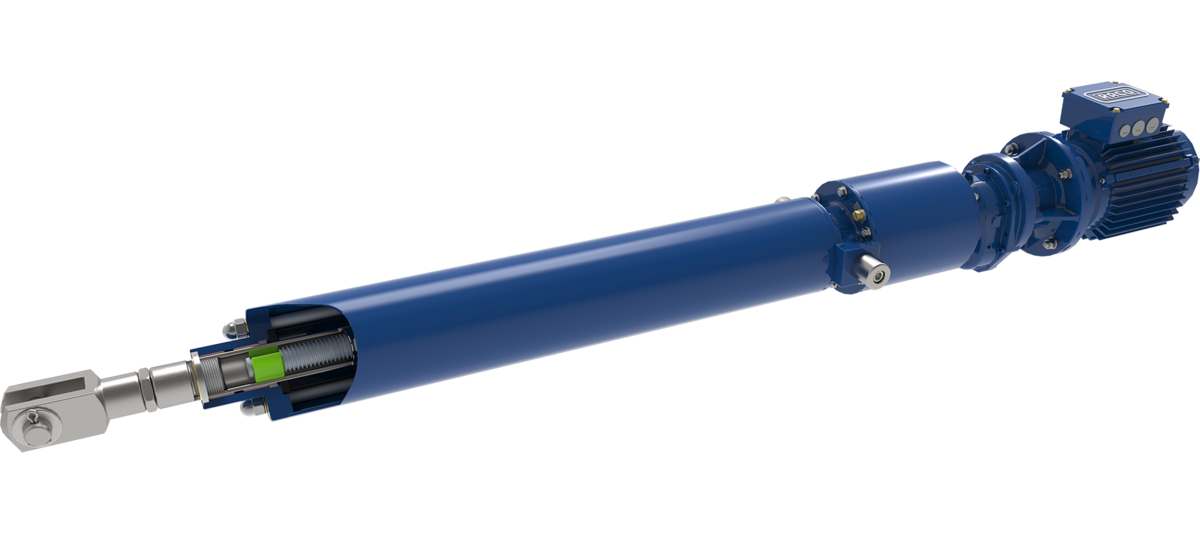
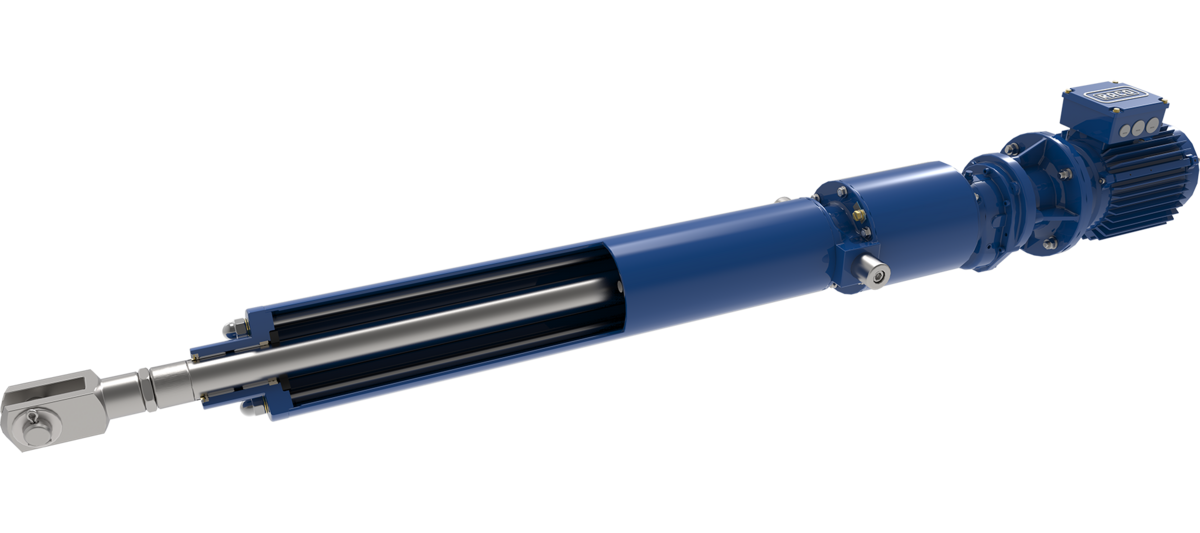
Dämpfer am Schubrohr
bild daempfer schubrohr

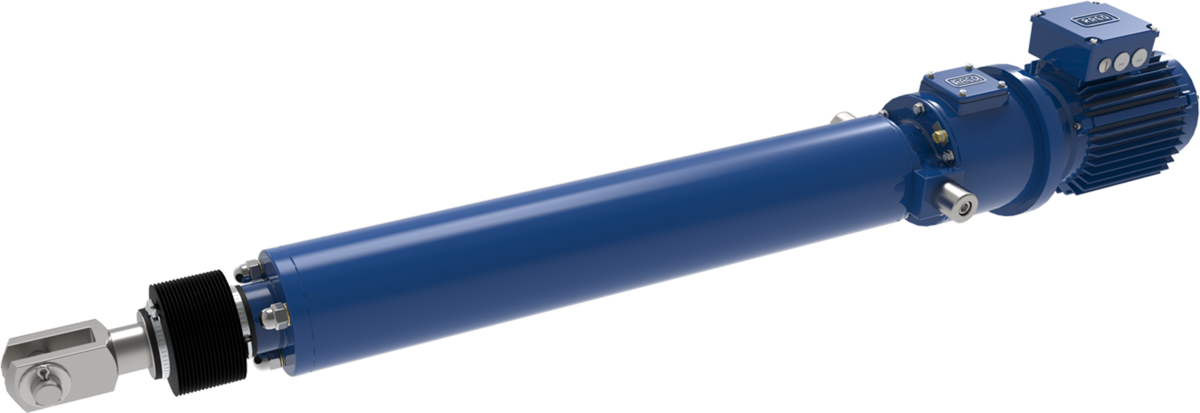


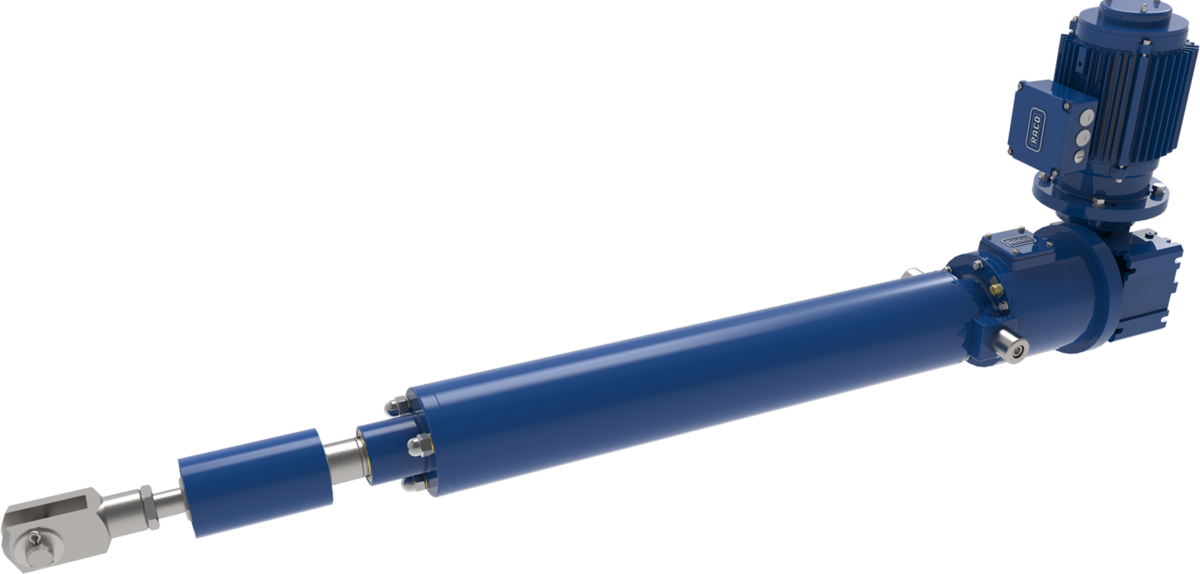
Zubehör Bauform M



Konfiguration A
Zwei einstellbare Endlagen
- Positionsgenaues Anfahren von 2 einstellbaren Endlagen
- Einstellbare Beschleunigungs- und Verzögerungsrampen
- Kraftbegrenzung bis zur eingestellten Maximalkraft
- Ausgabe des Positionssignals
- Begrenzung der Einstellmöglichkeiten der Positionsparameter als Schutzfunkton
- Verstellgeschwindigkeit über Potentiometer einstellbar
- Störmeldeausgang
Konfiguration B
8 einstellbare Positionen
- Positionsgenaues Anfahren von 8 einstellbaren Endlagen
- Einstellbare Beschleunigungs- und Verzögerungsrampen
- Kraftbegrenzung bis zur eingestellten Maximalkraft
- Ausgabe des Positionssignals
- Begrenzung der Einstellmöglichkeiten der Positionsparameter als Schutzfunkton
- Verstellgeschwindigkeit über Potentiometer einstellbar
- Störmeldeausgang
Konfiguration C
Weggesteuerter Elektrozylinder
- Anfahren beliebig vieler Positionen
- Einstellbare Beschleunigungs- und Verzögerungsrampen
- Kraftbegrenzung bis zur eingestellten Maximalkraft
- Ausgabe des PositionssignalsDigitale Ausgabe des Signals „Position erreicht“
- Verstellgeschwindigkeit über Potentiometer einstellbar
Konfiguration D
Kraftgesteuerter Elektrozylinder
- Steuerung des Befehls zur Aus- und Einfahrt
- Kraftgesteuertes Stoppen und Halten der Kraft
- Veränderbare Kraftbegrenzung bis zur vorgegebenen Maximalkraft
- Analoge Ausgabe der Ist-Position und der Ist-Kraft
- Verstellgeschwindigkeit über Potentiometer einstellbar
- Störmeldeausgang
Konfiguration E
Variable Ansteuerung über Feldbusschnittstelle
- Steuerung der Betriebsparameter (Beschleunigung, Kraft, Position)
- Umschaltbare Steuerparameter auch während des Prozesses
- Integration über Feldbusschnittstelle
- Genaue Ausgabe der Betriebsparameter
- Deizidierte Störmeldungen
- Kraftbegrenzung einstellbar bis zur Maximalkraft
- Störmeldeausgang
Konfiguration F
Gleichlaufsteuerung
- Positionsgenaues Anfahren von bis zu 4 RACO-Elektrozylinder im Gleichlauf
- Einstellbare Beschleunigungs- und Verzögerungsrampen
- Kraftbegrenzung bis zur eingestellten Maximalkraft
- Genaue Ausgabe der Betriebsparameter
- Analoge Ausgabe des Positionssignals
- Störmeldeausgang
EPS CAN
- berührungsloses, verschleißfreies Multiturn-Sensorsystem
- digitale Auflösung < 0,01mm
- integrierte Auswertung Thermokontakt / Kaltleiterfühler
- 2 Endlagen (potentialfreie Relaiskontakte)
- 2 Zwischenpositionen (npn-Transistorausgänge 24 VDC)
- Überlastabschaltung
- Parametrierung mittels Software RACOmatic® Tool
- Analoge Stellungsrückmeldung
- CANopen Schnittstelle

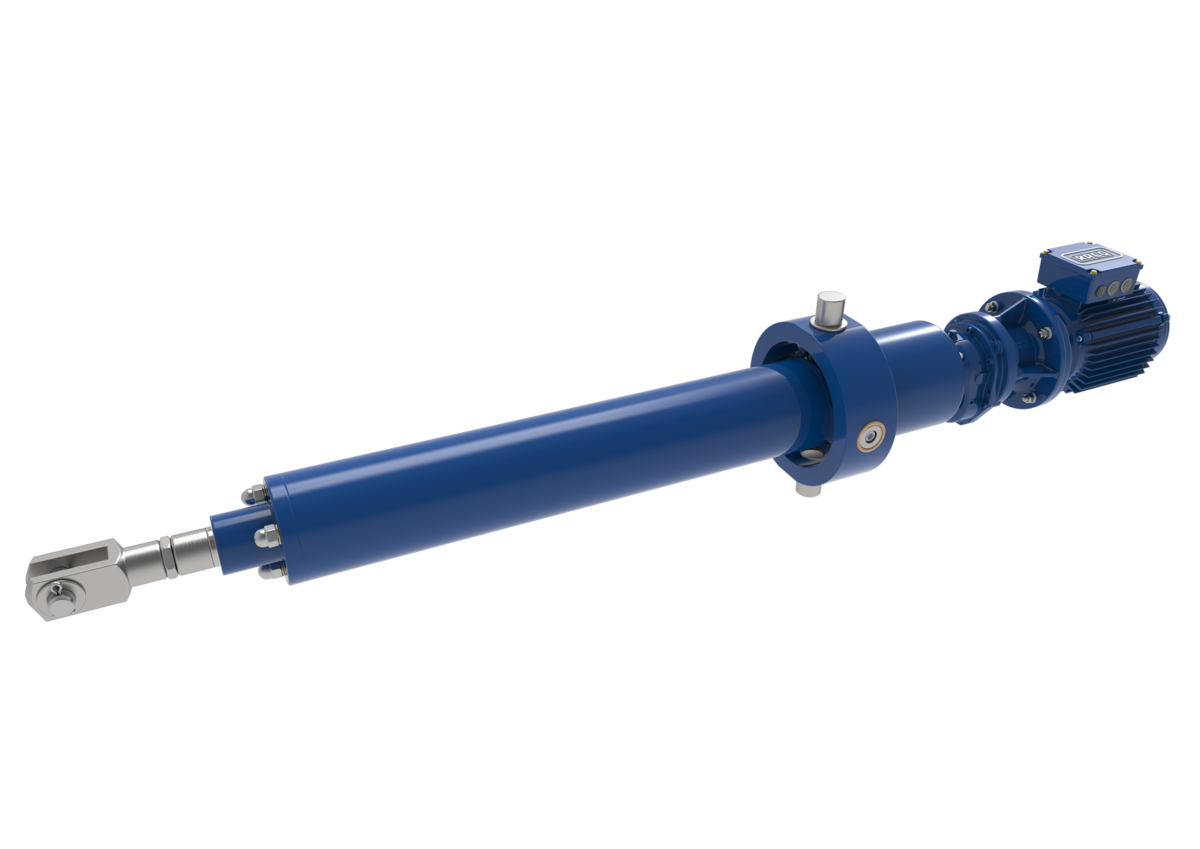
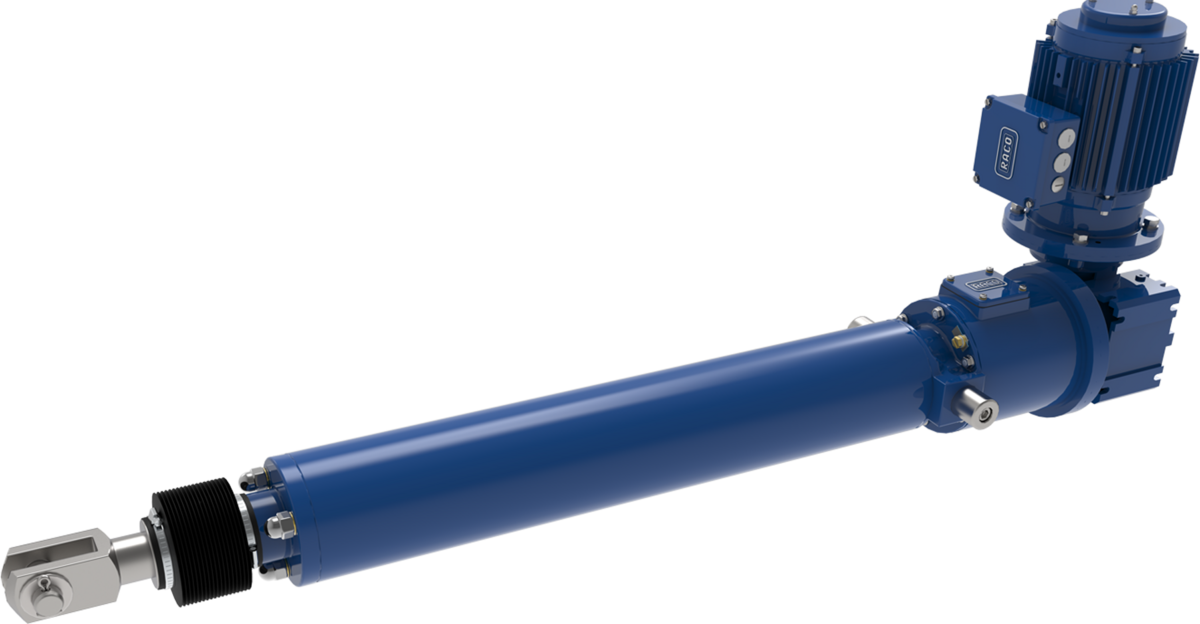
Zubehör Bauform C



Konfiguration A
Zwei einstellbare Endlagen
- Positionsgenaues Anfahren von 2 einstellbaren Endlagen
- Einstellbare Beschleunigungs- und Verzögerungsrampen
- Kraftbegrenzung bis zur eingestellten Maximalkraft
- Ausgabe des Positionssignals
- Begrenzung der Einstellmöglichkeiten der Positionsparameter als Schutzfunkton
- Verstellgeschwindigkeit über Potentiometer einstellbar
- Störmeldeausgang
Konfiguration B
8 einstellbare Positionen
- Positionsgenaues Anfahren von 8 einstellbaren Endlagen
- Einstellbare Beschleunigungs- und Verzögerungsrampen
- Kraftbegrenzung bis zur eingestellten Maximalkraft
- Ausgabe des Positionssignals
- Begrenzung der Einstellmöglichkeiten der Positionsparameter als Schutzfunkton
- Verstellgeschwindigkeit über Potentiometer einstellbar
- Störmeldeausgang
Konfiguration C
Weggesteuerter Elektrozylinder
- Anfahren beliebig vieler Positionen
- Einstellbare Beschleunigungs- und Verzögerungsrampen
- Kraftbegrenzung bis zur eingestellten Maximalkraft
- Ausgabe des PositionssignalsDigitale Ausgabe des Signals „Position erreicht“
- Verstellgeschwindigkeit über Potentiometer einstellbar
Konfiguration D
Kraftgesteuerter Elektrozylinder
- Steuerung des Befehls zur Aus- und Einfahrt
- Kraftgesteuertes Stoppen und Halten der Kraft
- Veränderbare Kraftbegrenzung bis zur vorgegebenen Maximalkraft
- Analoge Ausgabe der Ist-Position und der Ist-Kraft
- Verstellgeschwindigkeit über Potentiometer einstellbar
- Störmeldeausgang
Konfiguration E
Variable Ansteuerung über Feldbusschnittstelle
- Steuerung der Betriebsparameter (Beschleunigung, Kraft, Position)
- Umschaltbare Steuerparameter auch während des Prozesses
- Integration über Feldbusschnittstelle
- Genaue Ausgabe der Betriebsparameter
- Deizidierte Störmeldungen
- Kraftbegrenzung einstellbar bis zur Maximalkraft
- Störmeldeausgang
Konfiguration F
Gleichlaufsteuerung
- Positionsgenaues Anfahren von bis zu 4 RACO-Elektrozylinder im Gleichlauf
- Einstellbare Beschleunigungs- und Verzögerungsrampen
- Kraftbegrenzung bis zur eingestellten Maximalkraft
- Genaue Ausgabe der Betriebsparameter
- Analoge Ausgabe des Positionssignals
- Störmeldeausgang
EPS CAN
- berührungsloses, verschleißfreies Multiturn-Sensorsystem
- digitale Auflösung < 0,01mm
- integrierte Auswertung Thermokontakt / Kaltleiterfühler
- 2 Endlagen (potentialfreie Relaiskontakte)
- 2 Zwischenpositionen (npn-Transistorausgänge 24 VDC)
- Überlastabschaltung
- Parametrierung mittels Software RACOmatic® Tool
- Analoge Stellungsrückmeldung
- CANopen Schnittstelle
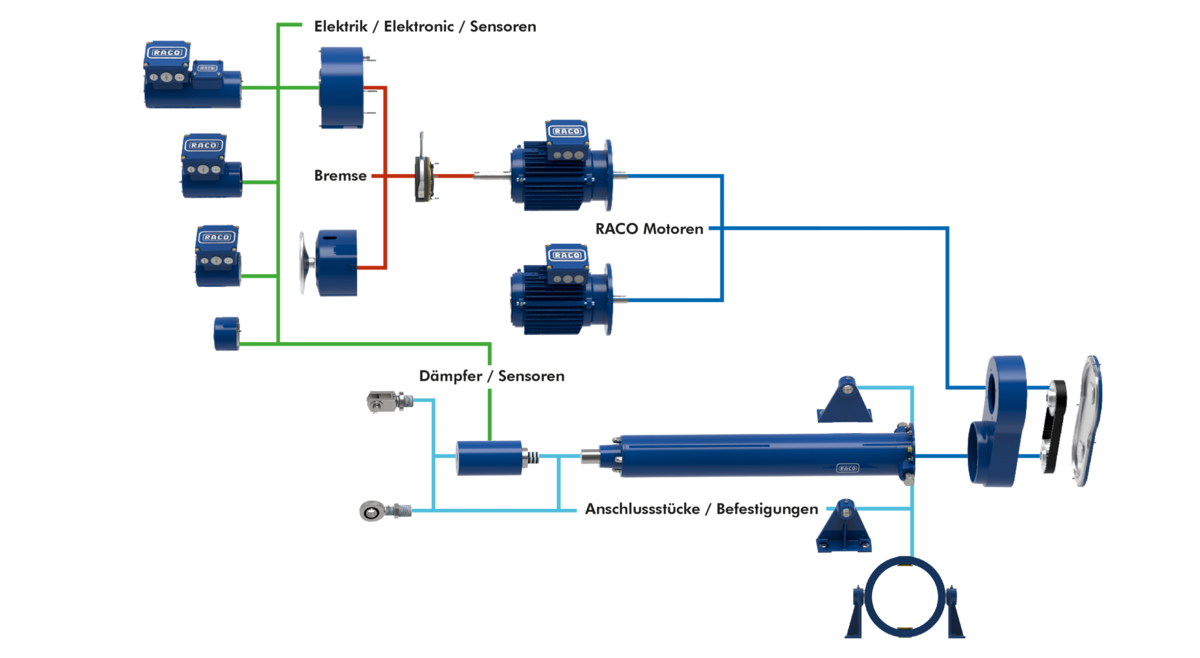
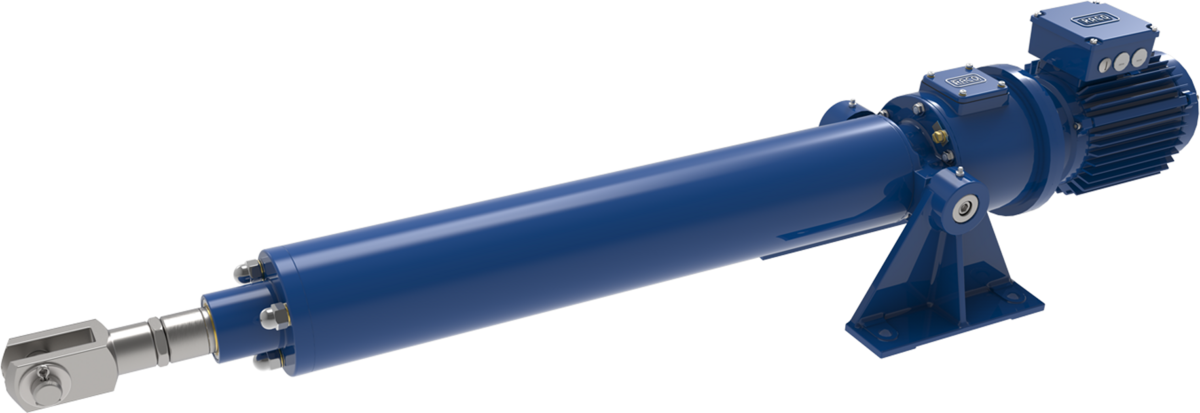
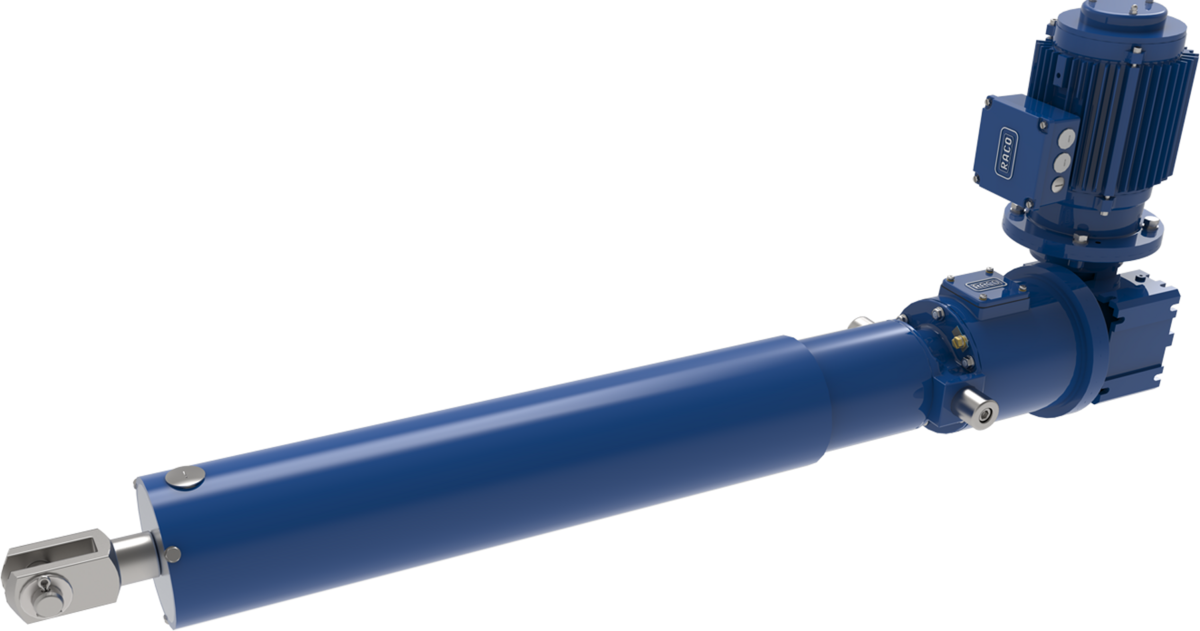
Zubehör Bauform T






Konfiguration A
Zwei einstellbare Endlagen
- Positionsgenaues Anfahren von 2 einstellbaren Endlagen
- Einstellbare Beschleunigungs- und Verzögerungsrampen
- Kraftbegrenzung bis zur eingestellten Maximalkraft
- Ausgabe des Positionssignals
- Begrenzung der Einstellmöglichkeiten der Positionsparameter als Schutzfunkton
- Verstellgeschwindigkeit über Potentiometer einstellbar
- Störmeldeausgang
Konfiguration B
8 einstellbare Positionen
- Positionsgenaues Anfahren von 8 einstellbaren Endlagen
- Einstellbare Beschleunigungs- und Verzögerungsrampen
- Kraftbegrenzung bis zur eingestellten Maximalkraft
- Ausgabe des Positionssignals
- Begrenzung der Einstellmöglichkeiten der Positionsparameter als Schutzfunkton
- Verstellgeschwindigkeit über Potentiometer einstellbar
- Störmeldeausgang
Konfiguration C
Weggesteuerter Elektrozylinder
- Anfahren beliebig vieler Positionen
- Einstellbare Beschleunigungs- und Verzögerungsrampen
- Kraftbegrenzung bis zur eingestellten Maximalkraft
- Ausgabe des PositionssignalsDigitale Ausgabe des Signals „Position erreicht“
- Verstellgeschwindigkeit über Potentiometer einstellbar
Konfiguration D
Kraftgesteuerter Elektrozylinder
- Steuerung des Befehls zur Aus- und Einfahrt
- Kraftgesteuertes Stoppen und Halten der Kraft
- Veränderbare Kraftbegrenzung bis zur vorgegebenen Maximalkraft
- Analoge Ausgabe der Ist-Position und der Ist-Kraft
- Verstellgeschwindigkeit über Potentiometer einstellbar
- Störmeldeausgang
Konfiguration E
Variable Ansteuerung über Feldbusschnittstelle
- Steuerung der Betriebsparameter (Beschleunigung, Kraft, Position)
- Umschaltbare Steuerparameter auch während des Prozesses
- Integration über Feldbusschnittstelle
- Genaue Ausgabe der Betriebsparameter
- Deizidierte Störmeldungen
- Kraftbegrenzung einstellbar bis zur Maximalkraft
- Störmeldeausgang
Konfiguration F
Gleichlaufsteuerung
- Positionsgenaues Anfahren von bis zu 4 RACO-Elektrozylinder im Gleichlauf
- Einstellbare Beschleunigungs- und Verzögerungsrampen
- Kraftbegrenzung bis zur eingestellten Maximalkraft
- Genaue Ausgabe der Betriebsparameter
- Analoge Ausgabe des Positionssignals
- Störmeldeausgang
EPS CAN
- berührungsloses, verschleißfreies Multiturn-Sensorsystem
- digitale Auflösung < 0,01mm
- integrierte Auswertung Thermokontakt / Kaltleiterfühler
- 2 Endlagen (potentialfreie Relaiskontakte)
- 2 Zwischenpositionen (npn-Transistorausgänge 24 VDC)
- Überlastabschaltung
- Parametrierung mittels Software RACOmatic® Tool
- Analoge Stellungsrückmeldung
- CANopen Schnittstelle




Passwort vergessen?
Bitte geben Sie Ihren Benutzernamen oder Ihre E-Mail-Adresse ein. Anweisungen zum Zurücksetzen Ihres Passworts werden Ihnen umgehend per E-Mail zugesandt.
Benutzerkonto anlegen
Wenn Sie noch keine Zugangsdaten besitzen, können Sie hier ein Benutzerkonto anlegen und die Freischaltung beantragen: Benutzerkonto erstellen
Bitte beachten Sie die Datenschutzerklärung.